ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2015, № 3, с. 97-112
СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
УДК 681.5:517.9
СТРУКТУРНЫЕ СХЕМЫ МНОГОСЛОЙНОГО ПЬЕЗОДВИГАТЕЛЯ НАНО- И МИКРОПЕРЕМЕЩЕНИЙ ПРИ ПОПЕРЕЧНОМ ПЬЕЗОЭФФЕКТЕ © 2015 г. С. М. Афонин
Москва, Московский государственный ин-т электронной техники (технический ун-т) Поступила в редакцию 28.01.14 г., после доработки 28.10.14 г.
Получены структурно-параметрическая модель и структурные схемы многослойного пьезо-двигателя при поперечном пьезоэффекте с учетом противоэлектродвижущей силы, возникающей при его деформации из-за реакции на силовое воздействие при прямом пьезоэффекте. Определены его передаточные функции с учетом влияния геометрических и физических параметров, противоэлектродвижущей силы и внешней нагрузки.
DOI: 10.7868/S000233881502002X
Введение. Применение прецизионного пьезопривода нано- и микроперемещений перспективно в оборудовании нанотехнологии, нанобиологии, микроэлектроники и астрономии. Пье-зодвигатель (пьезоактюатор, пьезопреобразователь) такого пьезопривода работает на основе обратного пьезоэффекта, перемещение достигается за счет деформации пьезодвигателя в диапазоне от единиц нанометров до десятков микрометров с точностью до десятых долей нанометров при приложении электрического напряжения [1].
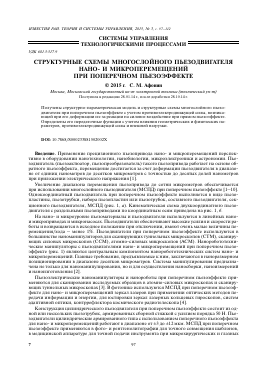
Увеличение диапазона перемещения пьезопривода до сотни микрометров обеспечивается при использовании многослойного пьезодвигателя (МСПД) при поперечном пьезоэффекте [1—10]. Однокоординатный пьезодвигатель при поперечном пьезоэффекте выполняется в виде пьезо-пластины, пьезотрубки, набора пьезопластин или пьезотрубок, составного пьезодвигателя, секционного пьезодвигателя, МСПД (рис. 1, а). Кинематическая схема двухкоординатного пьезодвигателя с раздельными пьезоприводами по координатным осям приведена на рис. 1, б.
На нано- и микроуровне пьезоматериалы и пьезодвигатели используются в линейных нано-и микроприводах и микронасосах. Пьезодвигатели обеспечивают высокие усилия и скорости работы и возвращаются в исходное положение при отключении, имеют очень малые величины перемещения/хода — менее 1%. Пьезодвигатели при поперечном пьезоэффекте используются в большинстве наноманипуляторов для сканирующих туннельных микроскопов (СТМ), сканирующих силовых микроскопов (ССМ), атомно-силовых микроскопов (АСМ). Наноробототехни-ческие манипуляторы с пьезодвигателями нано- и микроперемещений при поперечном пьезо-эффекте (рис. 1) являются центральным компонентом наноробототехнических систем нано- и микроперемещений. Главные требования, предъявляемые к ним, заключаются в наноразмерном позиционировании в диапазоне десятков микрометров. Система манипулирования предназначена не только для наноманипулирования, но и для осуществления наносборки, наноизмерений и наноизготовления [2].
Пьезоэлектрические наноманипуляторы и нанороботы при поперечном пьезоэффекте применяются для сканирования исследуемых образцов в атомно-силовых микроскопах и сканирующих туннельных микроскопах [3]. В фотонике используются МСПД при поперечном пьезоэф-фекте для нано- и микроперемещений зеркал лазеров при применении оптических методов передачи информации и энергии, для юстировки зеркал лазерных кольцевых гироскопов, систем адаптивной оптики, контррефлектора космического радиотелескопа [4].
Конструкция цилиндрического пьезодвигателя при поперечном пьезоэффекте состоит из одной или нескольких пьезотрубок, армированных сборной стяжкой с усилием порядка 50 Н. Пье-зодвигатели цилиндрические армированного типа с использованием поперечного пьезоэффекта для нано- и микроперемещений работают в диапазоне от ±3 до ±12 мкм. МСПД при поперечном пьезоэффекте применяются в фото- и рентгенолитографии для точного совмещения шаблонов, в медицинской аппаратуре для точной подачи инструмента при микрохирургических и глазных
7
97
1 - ось
///////
Се
Ш2
Ез
Ез
Ез Р-
Е3 Р-
///////
М1
о].
3 - ось
Си
-О и
Упругие элементы
Центральный держатель
Разгрузочные элементы
X
Пьезоактюаторы
XX
X = I
Ш2ш ыо -/2(0
ш
Ы(?)
Ез<о
Ез(?)
Р
х = к
х = О
ш&1(0 Ш ЖО в
Рис. 1. Кинематическая схема пьезодвигателя при поперечном пьезоэффекте: а — однокоординатного многослойного, закрепленного одним торцом, б — двухкоординатного, в — многослойного пьезодвигателя
операциях, в оптической и электронной микроскопии для нано- и микроперемещений предметного столика, в лазерной технике, устройствах волоконной оптики для управления лучом и юстировки волоконно-оптических систем передачи и приема информации, в оптических фазовых модуляторах, в системах адаптивной оптики, адаптивных телескопах, для автоматической подстройки квантовых генераторов, в космических радиотелескопах, в системах автоюстировки и настройки лазеров и интерферометров, в оптических фазовых модуляторах [5—7].
I
ъ
к
а
1
О
3
1. Постановка задачи. В отличие от описания МСПД нано- и микроперемещений при продольном пьезоэффекте [10] в настоящей работе рассмотрен МСПД нано- и микроперемещений при поперечном пьезоэффекте, имеющий соответствующие физические параметры (упругую податливость, пьезомодуль) и геометрические параметры, следовательно, получены соответствующие матричные уравнения и эквивалентный механический четырехполюсник, структурно-параметрическая модель, параметрические структурные схемы и передаточные функции МСПД при поперечном пьезоэффекте. В работе исследованы изменение упругой податливости и жесткости МСПД при поперечном пьезоэффекте с учетом противоэлектродвижущей силы (противоЭДС) и вида управления по напряжению и току.
В настоящей работе в результате совместного решения системы уравнений эквивалентного механического четырехполюсника МСПД (многослойного пьезоактюатора) при поперечном пьезоэффекте, соответствующих уравнений обратного и прямого поперечного пьезоэффекта и граничных условий на двух нагруженных рабочих поверхностях пьезодвигателя определяется его структурно-параметрическая модель. Из полученной структурно-параметрической модели МСПД определены передаточные функции МСПД нано- и микроперемещений при поперечном пьезоэффекте.
В расчетах по аналогии с классическим электроприводом требуется учет противоЭДС пьезодвигателя, соответствующей по аналогии противоЭДС якоря двигателя постоянного тока. Для этого в структурно-параметрических моделях и параметрических структурных схемах МСПД при поперечном пьезоэффекте вводятся отрицательные обратные связи, учитывающие прямой пьезоэффект в МСПД. В статье рассматривается влияние в статике и динамике противоЭДС на свойства пьезодвигателя при поперечном пьезоэффекте.
В отличие от классической работы Мэзона [11] и публикации [12], где рассматривается пье-зопреобразователь с фиксированной упругой податливостью для акустических и радиотехнических устройств, в настоящей статье производится расчет влияния вида управления пьезодвигате-ля при поперечном пьезоэффекте от источника напряжения или тока на упругую податливость и жесткость пьезодвигателя для устройств нано- и микроперемещений оборудования нанотехно-логий.
2. Структурные схемы многослойного пьезодвигателя. Уравнения поперечного пьезоэффекта [5] имеют вид
S1 (x, t) = d31E3 + sE1T1(x, t), (2.1)
D3(t) = d3Ti(x, t) + sT3E3(t). (2.2)
Здесь первое уравнение описывает обратный пьезоэффект, а второе — прямой пьезоэффект, S1 (x, t) = 52,(x, t)/dx — относительное смещение сечения пьезопластины по оси 1; х — координата; t — время; d31 — пьезомодуль при поперечном пьезоэффекте; E3(t) = u(t)/8 — напряженность электрического поля по оси 1; u(t) — напряжение на электродах пластины; 5 — толщина пьезопластины; s^ — упругая податливость по оси 1 при E = const; T1(x, t) — механическое напряжение по
оси 1; D3(t) — электрическая индукция по оси 3; &T33 — диэлектрическая проницаемость по оси 3 при T = const.
Рассмотрим МСПД при поперечном пьезоэффекте (рис. 1, в), состоящий из пьезопластин, соединенных электрически параллельно, а механически — последовательно. МСПД при поперечном пьезоэффекте имеет длину l, а каждая из составляющих его n пьезопластин имеет высоту h, толщину 8, ширину b и площадь поперечного сечения S0. Электроды нанесены на грани пьезопластин, перпендикулярные оси 3, причем поперечное сечение пьезопластины площадью S0 перпендикулярно оси 1, сечение пьезопластины площадью Sp перпендикулярно оси 3, площадь конденсатора МСПД составляет nSp.
Найдем систему уравнений эквивалентного механического четырехполюсника МСПД из матричных уравнений. Эквивалентный механический четырехполюсник пьезопластины, имеющей порядковый номер к в МСПД, составлен исходя из уравнения колебаний и уравнения сил, действующих на гранях пьезопластины [9]. Система уравнений, соответствующая четырехполюснику пьезопластины, имеет вид
(Лу) + -1-} + S k+1(P)S0Y = Fk(p), (2.3)
sh (hy)J s11sh (ny)
Вk(p)S0у + Вk+1(p)ScY L (hy) + insh (hY) in [ sh (hy)J
= -Fk+i(p),
где у = р/с + а — коэффициент распространения; р — комплексная переменная преобразования Лапласа; с — скорость звука, а — коэффициент затухания, — упругая податливость; £0 — площадь поперечного сечения пьезопластины [8, 9]. Из системы (2.3) получаем
¥к (р) = + Z2,1)E к (р) + Z2,1S к+1(р),
= к (Р) + (^1И + ^„^ к+1^
где ^
_SoYth (hY)
Z 2
_ SoY
iiis
;h (hY)
Из этих уравнений получаем следующую систему
(
- Fk =
1 +
Z i„
Z
(
Fk+i + Zi,,
Z 2
2ii
-Fk+i +
2 +
Z
"k+i>
(2.4)
2ii У
i +
z2
"k+Ъ
2ii У
которая эквивалентна матричному уравнению
'-Fk' = M Fk+i
_аk _ k+i_
(2.5)
Матрица М записывается в виде
M =
тп тп
m2i т22_
i + ^ Ziii
Z 2ii "
i
Z 2
2ii
2 +
Z i
iii
"2ц
i +
Z i
iii
где
Z
mn = m22 = i + —- = ch(hy), mi2 = Zii] Z 2ii
2 +
Zii
Z
Zoiish(hy),
2ii У
m2i =
_ i _ sh(hY) 7
Z 2,
Zo,
Zoii =
Входные параметры для МСПД: 2,к(?) — смещение и /к (?) — сила, действующие на входной грани к-й пластины. Выходные параметры: Ъкк+1(?) — смещение и /к+1(?) — сила на выходной грани к-й пластины и являющиеся входным смещением и силой для входной грани к + 1-й пластины. Сила на выходной грани к-й пластины равна по величине и противоположна по направлению с
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.