ИЗВЕСТИЯ РАИ. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2007, № 5, с. 5-10
== УПРАВЛЕНИЕ В СТОХАСТИЧЕСКИХ СИСТЕМАХ ^^^^^^
И В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ
УДК 519.816
УКЛОНЕНИЕ ОТ ОБНАРУЖЕНИЯ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
© 2007 г. Т. Г. Абрамянц, Е. П. Маслов, В. П. Яхно
Москва, ИПУ РАН Поступила в редакцию 16.01.07 г.
Рассматривается дифференциальная игра одного преследователя против группы из истинной и ложной целей в трехмерном пространстве, в которой согласованно действующие цели решают задачу уклонения истинной цели от обнаружения преследователем.
Введение. Вопросы поиска-уклонения цели от преследователя, снабженного ограниченной областью обнаружения, рассматривались в ряде монографий [1-5] и многочисленных статьях. В большинстве работ задачи поиска-уклонения одиночной цели решались как самостоятельно, так и в рамках более общей задачи преследования - уклонения.
Решенные задачи поиска-уклонения одиночной цели отличаются предположениями:
о размерности пространства поиска - на прямой [6], на плоскости [2, 3, 7, 8], в трехмерном пространстве [9],
о размерах области поиска - в ограниченной [3, 4, 8] и неограниченной областях [5, 8],
о классах стратегий поиска-уклонения - в чистых [1-5] и смешанных стратегиях [6, 7, 10], о видах поисковых траекторий [2, 3, 5, 8], о количестве поисковых систем [3, 8]. В результате решения задач определяются оптимальные законы поиска и/или уклонения и вид зоны захвата. Такое название получила подвижная область в пространстве поиска, прилегающая к области обнаружения преследователя и обладающая тем свойством, что из точек этой области уклонение невозможно [2, 8].
Дальнейшее развитие теория поиска-уклонения получила в связи с применением уклоняющимся ложных целей [11-16]. Наличие ложных целей приводит к информационной дискриминированно-сти преследователя, поскольку ему до момента классификации не известно, какая же из целей является истинной. Соответственно преследователь должен затратить определенные ресурсы для обнаружения, классификации и последующего дого-на истинной цели. Это обстоятельство позволяет сократить размеры области захвата, избежать обнаружения истинной цели, увеличить время до обнаружения истинной цели и т.д.
В статье рассматривается дифференциальная игра одного преследователя против группы из истинной и ложной целей в трехмерном простран-
стве, в которой согласованно действующие цели решают задачу уклонения истинной цели от обнаружения преследователем. В работе используются результаты решения задач об уклонении одиночной цели в трехмерном пространстве [9] и групповой цели - в двумерном [15].
1. Постановка задачи. Три объекта (преследователь Р, истинная цель Е1 и ложная цель Е2), обладая ограниченными скоростями, перемещаются в пространстве, имея возможность в каждый момент времени произвольно изменять направления своих движений ("простые движения" по терминологии [17]). Преследователь снабжен сферической зоной обнаружения радиуса Я, центр которой совпадает с его текущим положением. Обнаружение цели происходит при попадании ее на границу этой зоны. Предполагается, что до момента обнаружения какой-либо из целей преследователь движется по прямой с максимальной скоростью. После обнаружения цели - по траектории, соответствующей минимуму времени до классификации обнаруженной цели. Принимается, что классификация цели осуществляется преследователем с расстояния г < Я.
Вводится неподвижная прямоугольная система координат 0ХУ2, начало которой совмещено с исходным положением преследователя Р0, а положительное направление оси абсцисс совпадает с вектором скорости преследователя. Направления остальных координатных осей определены ниже. Прямолинейной поисковой траектории преследователя соответствует зона захвата, имеющая вид прямого кругового конуса [9] с углом полураствора при вершине (у = агс8т рх), где в - отношение максимальных скоростей истинной цели и преследователя; (Я/Рх; 0; 0) - координаты вершины конуса [9]. Предполагается, что в начальный момент времени
обе цели находятся в одной точке Е0 = Е0 = Е0 вне зоны обнаружения, но внутри области захвата. Система координат 0ХУ2 вводится таким образом, что точка Е0 лежит в плоскости Х0У и имеет коор-
динаты (х0; у0; 0). Здесь и далее верхний индекс указывает момент времени.
Процесс противодействия преследователя и системы целей состоит из двух этапов:
этапа поиска (цели преследователем);
этапа отвлечения (преследователя).
Уравнения относительного движения запишем как
W, = V!- и, 7 = 1, 2, М> ! ( 0) = W2 (0) = (1.1)
где wi = wi(t) - трехмерный вектор, направленный от Р к Е7 в момент t; и, vi - трехмерные векторы управлений (скоростей) Р, Ei соответственно. Временной масштаб выбран так, что максимальная скорость преследователя равна единичной; управления игроков подчинены ограничениям
\\и\\ < 1; IV| <рг < 1 7 = 1, 2, (1.2)
где || • || - евклидова норма, константы в, заданы.
Управление преследователя является программным на этапе поиска и позиционным - на этапе отвлечения. Управления целей - позиционные.
Коалиция целей согласованно максимизирует минимальное по времени расстояние между преследователем и истинной целью
= ш1п|| w1 (—► тах. (1.3)
t у 1, г2
Преследователь минимизирует длительность интервала времени от момента обнаружения первой по порядку (ложной) цели до момента ее классификации
G2 = Т - 5
Ш1П,
и
(1.4)
где 5 и Т - моменты обнаружения и классификации ложной цели соответственно, определяемые соотношениями
^2 (5 )|| = Я; ^2 (Т)|| = г.
В указанной системе координат расположение целей Е1, Е2 в момент 5 задается векторами wsl (х5;
у5; 0) и w2 (Я; 0; 0) соответственно. Угол между
векторами wsl и w2 обозначается 55. Момент 5 принимается в качестве нулевого, и от него ведется отсчет времени на этапе отвлечения.
Постановка задачи синтеза оптимальных законов управления преследователя и целей на этапе отвлечения включает :
уравнения относительного движения
W1 = V, - и, 7 = 1, 2; (2.1)
начальные условия
W1(5) = w5, 7 = 1, 2; критерии
Ои = ш1п|| w1 (0||
К (5 )|| = Я;
шах;
025 = Т
Ш1п;
и
условие классификации W 2 (Т) = 0.
(2.2)
(2.3)
(2.4)
(2.5)
Решение задачи (2.1)-(2.5) имеет следующий вид [16].
1. Все объекты движутся по прямым с максимальными скоростями.
2. Длительность этапа отвлечения не равна нулю при
|б5| < агссо8 в - а1гат в2.
В противном случае минимальное расстояние между преследователем Р и истинной целью на этапе отвлечения достигается при t = 5. 3. Движение объектов происходит в плоскости,
(1.5) проходящей через векторы w], w2. Цели движут-
Задача (1.1)—(1.5) является двухкритериаль-ной. В настоящей статье ее решение находится для случая г = 0. Классификация цели преследователем осуществляется в момент их точечной встречи.
2. Решение задачи. Задача решается поэтапно. Вначале определяются оптимальные управления для этапа отвлечения (этап 2), а затем - поиска (этап 1).
2.1. Этап отвлечения. Вводится вспомогательная неподвижная система координат 05 X5 У5 25 так, что ее начало совпадает с положением преследователя Р5 в момент 5 обнаружения ложной цели, ось абсцисс проходит через положение обнаруженной цели Е2 в тот же момент, а точка Е , в которой находится истинная цель, лежит в плоскости X5 05 У5.
ся в разные полуплоскости относительно оси абсцисс системы 05Х5У525.
4. Преследователь реализует алгоритм параллельного сближения с обнаруженной целью.
5. Ориентация оптимальных траекторий объектов в пространстве задается двумя углами. Один из них - между траекторией объекта и осью абсцисс системы 05Х5У525. Второй - между проекцией траектории на плоскость У50525 и осью 05У5. Углы снабжаются нижними индексами х и у соответственно; цифры 1 и 2 в нижних индексах указывают номера целей; верхний индекс означает, что углы отсчитываются от осей системы 05Х5У5£5. Положительным здесь и далее считается отсчет против часовой стрелки. Оптимальные величины снабжаются звездочками.
Для случая 55 > 0:
2
УКЛОНЕНИЕ ОТ ОБНАРУЖЕНИЯ управление цели E2
¥2* = (¥2* ,¥2*); к2*| = п/2, sign ¥ 2* = -sign 5s;
¥2* = п; управление преследователя
s
|ф x
ф * = (ф/,ф/);
* = arcsin в2; sign фХ* = -sign 5s;
фУ* = п;
терминальное условие
IK (s )|| = R,
критерий
G*s = М| cos (I ¥ 1*1 - |5s|)
-max.
(2.6)
(2.7)
Структура оптимальных управлений целей определяется с использованием принципа максимума. Составляется гамильтониан
Н = М (v1 - u) + v2 — u)-
max,
где точка между векторами здесь и далее обозначает скалярное произведение векторов. Оптимальные управления целей
V * = в Ml All, i = J, 2. Сопряженная система
A = -дН/ д w, = 0 ^ A = const.
В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
Г
P
управление цели E1
¥ 1* = (¥ 1* );
¥1* = arccosв, - arcsinв2, sign¥1* = sign5s;
¥1* = 0.
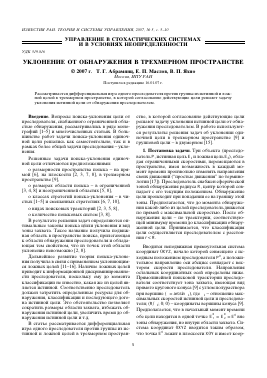
Рисунок 1 иллюстрирует расположение оптимальных траекторий объектов в плоскости, про-
ss
ходящей через векторы w1, w2. По построению она совпадает с плоскостью Xs0sYs. 6. Оптимальное значение критерия
G*s = ||wj||cos(|¥i*| - |5l).
2.2. Этап поиска. Постановка задачи синтеза оптимальных законов управления целей на этапе поиска включает:
уравнения движения и начальные условия (1.1), (1.2); в исходной системе координат 0XYZ по предположению управление преследователя на этапе поиска u = (1; 0; 0);
PT = ET
Рис. 1.
Следовательно, на этапе поиска оптимальными траекториями целей являются прямые, по которым цели движутся с максимальными скоростями. Поэтому (2.7) можно переписать в следующем виде:
G*s = wj cos( ¥ 1*1 - |5l)-
max ,
¥¡„¥¡3,
i = 1, 2, (2.8)
где ¥гх, г = 1, 2, - углы, которые составляют траектории цели Ег- с осью абсцисс системы 0ХУ2; / = 1, 2, - углы между проекциями траектории Е, на плоскость У02 и осью 07 соответственно.
Определим условия, связывающие расположение объектов в момент 5 обнаружения ложной цели при оптимальном поведении целей на этапе поиска. Вводится вспомогательная неподвижная система координат 05Х'Х 2\, которая получается вращением системы 0Х5У525 (см. разд. 2.1) вокруг оси 0Х5 таким образом, чтобы точка Е0 оказалась
в плоскости X 0Х . При таком вращении оси 05Х5 и 05Х совпадают. В этой систем
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.