ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2014, № 4, с. 111-122
СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖУЩИМИСЯ ОБЪЕКТАМИ
УДК 517.938
УПРАВЛЕНИЕ ПО ВЫХОДУ СПЕКТРОМ ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА*
© 2014 г. Н. Е. Зубов, Е. Ю. Зыбин, Е. А. Микрин, М. Ш. Мисриханов, А. В. Пролетарский, В. Н. Рябченко
г. Королев МО, ОАО РКК "Энергия " Москва, МГТУим. Н.Э. Баумана Поступила в редакцию 09.07.13 г., после доработки 12.02.14 г.
Разработан эффективный подход к управлению по выходу спектром многомерных динамических систем, заданных в пространстве состояний. Подход одинаков для непрерывного и дискретного случаев описания математической модели системы, не имеет ограничений по алгебраической и геометрической кратности элементов спектра, позволяет получать аналитические решения и параметризацию (построение) множества регуляторов.
DOI: 10.7868/S0002338814040179
Введение. Задача управления по выходу спектром движения динамической системы относится к разряду классических в теории систем [1—5], однако пока не имеет исчерпывающего решения. Данная задача актуальна, когда при управлении не используются динамические расширения в виде различных наблюдателей состояния, а применяются обратные связи по выходным сигналам.
Рассмотрим полностью управляемую и наблюдаемую линейную динамическую систему стх(0 = Ax(t) + Bu(í), y(0 = Cx(í), x(0) = x 0, (0.1)
где t — время, непрерывное te [R+ = [0, +o>) или дискретное te N0 = {0,1,2,...}; x e Rn — вектор состояния; u e Rr — вектор входа; y e Rm — вектор выхода; R — множество действительных чисел; m ■ r > n; a — символ оператора дифференцирования при непрерывном времени ax(t) = x(t) и оператора сдвига вперед при дискретном времени ax(t) = x(t + 1). Предполагается, что B е Rnxr, C е Rmxn — матрицы полного ранга, а спектр (множество собственных значений, полюсов) матрицы A е Rnxn равен
eig (a) = {А,, е С : det (АД* - a) = 0,1 = 1*},
где I* — единичная матрица размера n х n, С — множество комплексных чисел (комплексная плоскость).
Пусть Л — заданный спектр. Требуется для системы (0.1) найти закон управления по выходу с
обратной связью u(t) = Fy(t) = FCx(t), где F е Rrxm — матрица регулятора, чтобы спектр матрицы A + BFC удовлетворял равенству
eig(A + BFC) = Л = {X Д2,..., X*}. (0.2)
Сложность рассматриваемой задачи объясняет в том числе отсутствие на сегодняшний момент времени конструктивных методов и алгоритмов, позволяющих получать решение для многомерных систем с многими входами и выходами (MIMO) с различной (алгебраической и геометрической) кратностью задаваемых элементов спектра (0.2), построение множества регуляторов, а также синтеза регуляторов в явном аналитическом виде.
В данной работе представлен эффективный метод синтеза управления по выходу спектром движения MIMO-системы, не зависящий от алгебраической и геометрической кратности назначаемого спектра (0.2), обеспечивающий построение множества регуляторов, в том числе в явном виде.
* Работа выполнена при финансовой поддержке Российского научного фонда.
В основе метода лежит подход, ранее опубликованный авторами в работах [5—7]. Здесь возможности описываемого подхода демонстрируются на решении задачи управления движением гипотетического космического аппарата (КА) самолетного типа в зоне глиссадного маяка в вертикальной плоскости.
1. Декомпозиция динамической системы. Для определенности положим m > r и введем в рассмотрение многоуровневую декомпозицию системы (0.1) следующего вида ([5—7]):
нулевой уровень декомпозиции
A о = A, Bo = B, Co = C, (1.1)
первый уровень декомпозиции
A1 = B 0A 0^ B1 = B °A 0B0, C1 = C оA 0^ (1.2)
k-й уровень декомпозиции (1 < к < M)
A к = Bfe-1A k-1B ¿-ъ B к = B ¿-1A k-1B k-l, C к = C k-1A k-1B ¿-ъ (1.3)
M-й уровень декомпозиции (здесь M = ceil (n/r), где ceil (*) — операция округления числа "*" в сторону большего значения)
A M = B M-1A M-1BM-1, BM = B M-1A M-1BM-1, C M = C M-1A M-1BM"-1- (1.4)
В формулах (1.1)—(1.4) для к = 0, M фигурируют матрицы со свойствами
(ъ+^
^к bк = 0 вkвk
(Bk |в ) =
(C v1
в+
V в * )
В*В к = 0, В+Вк = Ir, (1.5)
C1
v C к
= (c+ |c ¿t), c¿ct = 0, ckc + = im, (1.6)
где верхним индексом "Т" обозначена операция транспонирования, индексом "±" — полуортогональные аннуляторы (делители нуля), а индексом "+" — псевдообратные матрицы Мура—Пенроуза [8].
Введем в рассмотрение форму регуляторов для управления спектром на соответствующих уровнях декомпозиции (в обратном порядке): М-й уровень декомпозиции
^ = (фМБМ - ВМАм)СМ, (1.7)
к-й уровень декомпозиции (1 < к < М)
¥к = (ФкВ- - В-Ак)СВ- = В + - Р^В(1.8) первый уровень декомпозиции
Р = (ФВ - В-А 1)С+, В- = В+ - Р2В^, (1.9)
нулевой уровень декомпозиции
Р = (ФоВ- - В-Ао)С+, В- = В+ - ЦВ^. (1.10)
2. Основной теоретический результат. Справедливо утверждение.
Теорема 1. Пусть т > г, следующие матрицы существуют и попарно полностью управляемые: СМ = ВмАмСМ(ВМСМ) , НМ = (ВМСМ) , (2.1)
СТ = В-А кС ¿(В-С к)+, НТ = (В-С (2.2)
СТ = В-А 1С11(В1-С11)+, НТ = (В-С])1, (2.3)
СТ = В-А оС01(В-С °)+, НТ = (В-С о1) 0, (2.4)
тогда существует непустое множество матриц К,, , = 0, М, таких, что
Ф, = С, + КТН = (В,-А,С ■ )(В-С + КТ(В-С;У, (2.5)
и для (1.7)—(1.10) выполняются равенства
eig (A м + B m FM C m ) = eig^ M), (2.6)
M
eig (A, + B^C,) = U eig^;), (2.7)
i = k M
eig (A! + B^A) = U eig(Фi), (2.8)
i = 1
M
eig (Aо + Bqf0cо) = eig (A + BFC) = \ eig(0;-) = Л. (2.9)
i = о
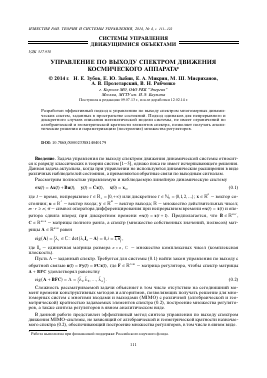
Блок-схема, поясняющая алгоритм формирования матриц (2.6)—(2.9), приведена на рисунке. Доказательство теоремы приведено в Приложении.
Условие m > r в теореме 1 не имеет обременительного характера и введено для указания, что в данном случае матрица F традиционно рассматривается как матрица регулятора (число входов меньше, чем выходов).
Для случая m < r теорема 1 имеет дуальную формулировку, а матрица F заменяется на матрицу наблюдателя L (число входов больше, чем выходов).
Те о р е м а 2. Пусть m < r, N = ceil (n/m), выполнена декомпозиция системы (0.1) вида
A о = A, Во = B, Со = C, (2.10)
A1 = СоAоСО , В1 = СoAоСо, С1 = СoAоСо , (2.11)
Ak = Сfc-1Ak-1Сfc^ Bk = С¿-1Ak-1Сk-1, Сk = Сk-1Ak-1C1 < k < ^ (2.12)
A N = С N-1A N-1С N-1, B N = С N-1A N-1С N-1, С N = С N-1A N-1C N-1, (2.13)
следующие матрицы существуют и попарно полностью наблюдаемы:
Gn = (BNСN)+BNaNсN, hN =(BNСN^ (2.14)
G k = (B ¿С+)+B ¿A kC+, H k = (B ¿С+)\ (2.15)
G1 = (B]LC1+)+B]LA 1С+, H1 = (B^1)1, (2.16)
gq = (B ¿"С+)+B ¿"A Qc+, hQ = (B^)1, (2.17)
тогда существует непустое множество матриц L l, i = 0, N, таких, что
¥ i = G;. + H;LT = (B^)+BMiC + + (B^)^, (2.18) и при
fN = BM(СM¥M - AMcM), (2.19)
Fk = B+(Сk - A kC-), С- = С + - С f Fk+1, (2.20)
F1 = B1+(C-^1 - A 1С-), С- = С++ - C!1TF2, (2.21)
fq = B+(Cо - A Qc-), С - = С+ - C01TF1, (2.22) выполняются равенства
eig (A n + B n fn С n ) = eig(¥ n ), (2.23)
N
eig (Ak + BkFkCk) = U eig(^i), (2.24)
i = k
Система
Регулятор
I 1Т I
Ак = Вк - 1Ак - 1Вк - 1 Вк = Вк - 1Ак - 1Вк - 1
1Т
Ск = Ск - 1Ак - 1Вк - 1
М-й уровень декомпозиции
Рк = (ФкВ- - В- Ак)С1
В- = В+ - рк + 1Ск + 1в|
г,
М
Ф
М
\
Модуль управления спектром пары матриц , ОМ = (ВМАМСМ)(ВМСМ) , НМ = (ВМСМ)
I 1Т I АМ = ВМ - 1АМ - 1ВМ - 1 Вм = ВМ - 1АМ - 1ВМ - 1 1Т СМ = СМ - 1АМ - 1ВМ - 1 V ---- С N ^М - (Ф МВМ - ВМАМ) (СМ < У
Т — I — I + Т — I I
Ф, = О, + КН: Ф, = (В- АС,)(В- С1) + К,(В- С1)
Блок-схема алгоритма формирования управления
N
е1в (А 1 + ВДС1 ) = У е1в(¥,), (2.25)
1 = 1
N
е1в (А о + В о^С о) = е1в (А + ВРС) = у = Л. (2.26)
1= о
Как и в алгоритмах [5-7], здесь при преобразованиях используются только полуортогональные и псевдообратные матрицы, что, по крайней мере, не ухудшает обусловленность уравнений. Подход не содержит ограничений в виде различия алгебраической и геометрической кратности элементов назначаемого спектра, а также на размерность решаемой задач. Это подтверждается математическим моделированием, которое показало высокую относительную точность управления спектром и практическое отсутствие ограничений на размерность системы (0.1).
3. Аналитический синтез управления движением КА по глиссаде в продольном канале. В качестве практического примера осуществим синтез закона управления по выходу спектром движения КА. Следует также отметить, что предложенный подход позволяет получать аналитическое решение (в том числе параметризацию множества решений) задачи управления по выходу спектром системы (0.1).
Рассмотрим задачу управления движением гипотетического КА самолетного типа в зоне глиссадного маяка в вертикальной плоскости, т.е. в продольном канале. В качестве органов управления используются тормозные щитки, руль высоты, закрылки. В этом случае линеаризованные уравнения продольного канала в отклонениях в соответствии с [9, 10] будут иметь вид
(3.1)
Здесь AV — отклонение воздушной скорости продольного движения КА, Да, Д&, Дю* — отклонения по углу атаки, тангажа и угловой скорости канала тангажа соответственно, б г— угол отклонения от направления глиссады в вертикальной плоскости, an, a12, a13, a21, a22, a41, a42, a44, a52, a53, a55 — коэффициенты линеаризации. В обозначениях [9] a11 = -n11, a12 = -n12, a13 = -n13, a21 = n21,
Гдг 1 ' an a12 a13 0 01 f^V1 Г bu 0 01
Д(х a21 a22 0 1 0 Да 0 b22 b23 Г Д8т.щ ^
ДЗ = 0 0 0 1 0 ДЗ + 0 0 0 Д8р.в
д® * a41 a42 0 a44 0 дюг 0 b42 b43 v Д8з У
V 6 г V 0 a52 a53 0 a55 У V 6 г У V 0 0 0 У
l22
-n
22 > "41
-n
31> "42
-n
32> "44
-n
33'
¿52
-a.
53
л55
TaV
V (t)dt
где та — аэродинамическая постоянная времени КА, V — воздушная скорость продольного движения КА. Коэффициенты линеаризации Ьп, Ь22, Ь23, Ь42, Ь43 соответствуют а\тщ,а^рв, а®', а®ргв, аъх3 из [10], Д5т.щ, Д8рв, Д5з — представляют собой компоненты вектора управления
ГД5т. Д5Р
V Д8з у
и характеризуют собой долю отклонения тормозных щитков, отклонения руля высоты и закрылков соответственно. В обозначениях уравнения (0.1) матрицы А и В с учетом (3.1) запишутся так:
(
an a12 a13 0 0 ^ ( b11 0 0
a21 a22 0 1 0 0 b22 b23
0 0 0 1 0 , B = 0 0 0
a41 a42 0 a44 0 0 b42 b43
0 a52 -a52 0 a52 l 0 0 0
A =
Матрицу выхода задад
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.