Акустические методы
УДК 534.8+620
ВОССТАНОВЛЕНИЕ ИЗОБРАЖЕНИЯ ОТРАЖАТЕЛЕЙ КОРРЕЛЯЦИОННЫМ МЕТОДОМ ПРИ ПРОИЗВОЛЬНОМ КОЛИЧЕСТВЕ ОТРАЖЕНИЙ УЛЬТРАЗВУКОВОГО ИМПУЛЬСА ОТ ГРАНИЦ ОБЪЕКТА КОНТРОЛЯ, СОСТОЯЩЕГО ИЗ ОБЛАСТЕЙ С РАЗНЫМИ АКУСТИЧЕСКИМИ СВОЙСТВАМИ
Е.Г. Базулин
Рассмотрен алгоритм восстановления изображения отражателей по эхосигналам, распространяющимся в объекте контроля, состоящим из нескольких областей с различными акустическими свойствами. Для расчета лучевых траекторий используется не вариационный принцип Ферма, а метод непосредственного построения семейства лучей, исходящих из точки, где находится излучатель. Построив семейство лучей, можно проанализировать их принадлежность к определенной акустической схеме и выполнить аппроксимацию рассчитанных задержек на пространственную сетку области восстановления изображения (ОВИ). Это позволит рассчитать как время пробега импульса от излучателя до любой точки ОВИ и обратно к приемнику, так и ослабление амплитуды импульса из-за эффектов расхождения, отражения и преломления на границах областей, составляющих объект контроля. В численных и модельных экспериментах показана работоспособность предложенного алгоритма восстановления изображения отражателей.
Ключевые слова: у.з. неразрушающий контроль, корреляционный метод, двойное сканирование, Full Matrix Capture (FMC), тройное сканирование, антенная решетка, метод SAFT, метод C-SAFT, Total Focusing Method (TFM), цифровая фокусировка антенной решеткой (ЦФА).
1. ВВЕДЕНИЕ
Восстановление по измеренным эхосигналам высококачественных изображений отражателей, по которым можно определить тип отражателей и их размеры, — очень важная задача неразрушающего контроля, в частности, ультразвукового. Ее решение позволит автоматизировать анализ результатов контроля, повысить скорость формирования протокола контроля и уменьшить субъективное влияние оператора.
Для решения обратной задачи корреляционным методом [1] нужно решить прямую задачу, то есть при известном положении излучателя нужно рассчитать поле, рассеянное отражателем заданной формы. В практике у.з. контроля, как правило, ограничиваются вычислением времен задержек эхосигналов без расчета его амплитуды. Для расчета времени пробега импульса по лучевой траектории можно воспользоваться вариационным принципом Ферма [2]. С его помощью рассчитывают лучевые траектории для однородных и неоднородных объектов с неровными границами с учетом трансформации типов волн при преломлении и отражении [3]. Однако итерационный способ определения траектории с минимальным временем пробега требует значительных вычислительных ресурсов. А при расчете траекторий в объекте, состоящем из нескольких областей с разными акустическими свойствами, проявляется существенный недостаток программной реализации вычислений по принципу Ферма. Дело в том, что в процессе решения задачи минимизации траектория может менять количество точек пересечений границ областей с разными акустическими свойствами. Это означает, что нужно разработать метод минимизации функции многих переменных, число которых может меняться в процессе решения. Такой итерационный метод также потребует больших вычислительных мощностей. Есть еще одна особенность расчета задержек — в точку расположения отражателя импульс может попасть по нескольким
Евгений Геннадиевич Базулин, канд. физ.-мат. наук, начальник научно-методического отдела ООО «НПЦ «ЭХО+». Тел. (495) 780-92-50. E-mail: bazulin@echoplus.ru
траекториям. Для выхода из этой ситуации при использовании принципа Ферма потребуется решить несколько задач минимизации с разными начальными траекториями, что увеличит время восстановления изображения отражателей.
Поэтому для расчета лучевых траекторий в объектах, состоящих из нескольких областей с разными акустическими свойствами, нужно разработать алгоритм, не использующий принцип Ферма [4]. Построение множества лучей из заданной точки излучения в некотором диапазоне углов с учетом многочисленных отражений и преломлений должно позволить рассчитать задержки распространения эхосигналов при решении прямой задачи. Такой подход ускорит работу алгоритма восстановления изображений отражателей в объектах с множеством областей с разными акустическими свойствами. Алгоритм расчета у.з. поля, основанный на лучевом подходе, в силу своей параллельности идеально подходит для реализации с помощью технологии NVIDIA CUDA [5].
2. КОРРЕЛЯЦИОННЫЙ МЕТОД ВОССТАНОВЛЕНИЯ ИЗОБРАЖЕНИЯ
ОТРАЖАТЕЛЕЙ
Решение обратной задачи рассеивания заключается в том, чтобы по известным источникам поля q(rt, t), расположенным в области S и по измеренному в области Sr рассеянному полю p(r t) найти функцию e(r), описывающую отражающие свойства неоднородности в области S.
Один из распространенных методов оценки функции e(r) заключается в корреляционной обработке измеренного поля p(r t). Решение прямой задачи, то есть расчет рассеянного поля p(rr, t) = p(rr, t; rt) по известным функциям q(r t) и e(r), в формальном виде запишем следующим образом:
P(r, t) = P(e(r), q(r, t)). (1)
Помещая точечный отражатель в произвольную точку r то есть полагая e(r) = 5(r - r), можно оценить вид функции e(r) по корреляционной формуле:
ё (r)= Ш1 p (r, t )G (r, r, r>-, t )drdrrdrtdt;
St Sr S
G(,rt,r,,t) = P(5(r -r,), q(rt,t)). (2)
Функция G(rr, r r t) зависит от формы излученного импульса s(t) и должна учитывать все возможные варианты отражения импульса от границ объекта контроля. При таком подходе задача восстановления изображения отражателей сводится к многократному решению прямой задачи для функции e(r) = 5(r - r,) при заданном числе отражений от границ объекта контроля при излучении и приеме. Чем точнее удастся решить прямую задачу (1) с учетом эффектов отражения, преломления и трансформации типов волн, анизотропии акустических свойств материалов, затухания звука, наличия нескольких областей с разными акустическими свойствами, тем больше список объектов контроля, в которых можно восстанавливать высококачественные изображения отражателей.
Если при расчетах функцию s(t) заменить на 5(t - tmax), где tmax — время нарастания импульса, и рассматривать только одну акустическую схему на прямом луче, то выражение (2) превращается в формулу, описывающую метод C-SAFT
ё (Г ) = Ш p(rr't)6(t ~ tw(rr' rt' Г) + ^J^Aß =
St Sr
= ii P (Гг't " tdel (Гг, rt, Г ) + tmax ))*, (3)
S, Sr
где tdel(r г,, г.) — время пробега импульса от излучателя до точки г. и к приемнику для заданной акустической схемы. Если регистрация эхосигналов происходит в совмещенном режиме работы одноэлементного преобразователя, когда rr = г,, то формула (3) описывает метод SAFT. В данной статье будем рассматривать двумерную задачу.
Метод формирования изображения по многим акустическим схемам рассмотрен в [6] и назван в ней методом M-C-SAFT. Он представляет собой упрощенный вариант корреляционной обработки (2), когда формируются множество парциальных изображений e(r.; asn), по задержкам tdel(r г,, г.) для списка акустических схем Lж = {as}N . В [7, 8] также рассмотрена проблема восстановления изображения по нв скольким акустическим схемам. Итоговое изображение отражателя определяется как модуль когерентной суммы парциальных изображений по формуле
' (г. ) =
Zё(г.; asn)
(4)
Если антенная решетка перемещается — раз для разных значений вектора г^, определяющего положение призмы на объекте контроля, то, добавив когерентное суммирование изображений, восстановленных для каждого положения антенной решетки, можно получить объединенное (итоговое) изображение отражателей с еще более высокой фронтальной разрешающей способностью по формуле
n=1
' (г. ) =
Nw Nas
w=1 n =1
; as„
(5)
Этот метод сокращенно можно обозначить как Т8-М-С-8АРТ. Формулы (4) и (5) можно модифицировать так, чтобы складывать модули парциальных изображений.
2.1. Основные правила задания объекта контроля
Перед рассмотрением алгоритма восстановления изображения необходимо определить правила описания модели объекта контроля. С геометрической точки зрения область, обозначим ее буквой 5, определяется границей из списка длиной Ыь векторов с координатами начала и конца Ьь = {Ь}- =
= {((Х^ ^агЛ Zfinish))}Nь, где П = 1 2 ^ НГ Наличие плавных линий ^РИ
описании объекта контроля может привести к возникновению каустик, расчет амплитуды поля в которых требует более сложных методов, нежели при отражении от границы в виде прямой линии. Поэтому ограничимся в данной статье рассмотрением областей с границами из прямых линий. Список {Ь}„ должен быть составлен так, чтобы конец каждого вектора Ь совпадал с началом следующего Ьп+1, а конец последнего должен совпадать с началом первого. Из списка векторов Ьь формируется список из областей Ь5 = ={Ь ь, Ь2Ь, ... Ьы ь} = {я}^, который и описывает обЪект контроля. Акустические параметры каждой области списка 5т задаются списком
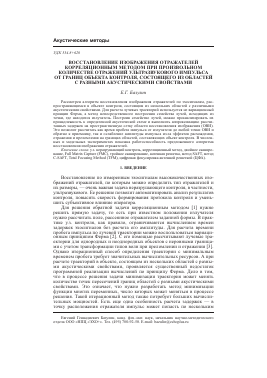
{ср с^ р, 5р где с1 и с^ — скорости продольной и поперечной волн; р — плотность; и — декременты затухания продольной и поперечной волн. Параметры {с,, с, р}т каждой области используются для расчета углов отражений и преломлений при трассировке лучей. С помощью списка областей = можно описать объект контроля с неровными границами и областями с разными акустическими свойствами, в том числе призму преобразователя или антенной решетки. На рис. 1 показан объект из трех областей {^}3, причем вектор Ь5 входит в список, описывающий границу области 51, и он же входит в описание границы области я но как -Ь5 (на рисунке схематично показан стрелкой сиреневого цвета рядом с вектором Ь5). Аналогичным образом обстоит дело с векторами Ь7, Ь8 и Ь9, которые описывают границу областей и я2.
Рис. 1. Описание объекта контроля, состоящего из трех областей {я}.
Для определения углов падения лучей на границы областей будем считать, что нормали пп (отмечены стрелками синего цвета) к векторам Ьп границ должны быть направлены внутрь каждой области я После описания объекта контроля нужна процедура контроля задания границ областей на основе списка Ьь = {Ь}^, которая должна контролировать соблюдение этого правила. Стрелками чер ного цвета схематично показан ф
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.