ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2013, № 1, с. 111-121
НАВИГАЦИОННЫЕ СИСТЕМЫ
УДК 62.40
ВЫСТАВКА БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО
АППАРАТА В ПОЛЕТЕ
© 2012 г. К. К. Веремеенко, В. М. Савельев
Москва, ФГУПГосНИИАС, МАИ (национальный исследовательский ун-т) Поступила в редакцию 05.09.11 г.
Объектом исследования является система выставки бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата, закрепленного на борту самолета-носителя, в процессе полета. Цель исследования — разработка схем выставки бесплатформенной инерциальной навигационной системы, позволяющих повысить точность выставки и сократить ее длительность. Предложена схема построения системы начальной выставки бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата.
Б01: 10.7868/80002338812060145
Введение. Основой большинства современных бортовых навигационных комплексов служит бесплатформенная инерциальная навигационная система (БИНС). Качество ее работы во многом определяется точностью проведения ее подготовки перед запуском — начальной выставки во время которой в системе должны быть определены или введены извне начальные координаты, проекции скорости и углы ориентации аппарата. Существуют различные способы проведения этого процесса, среди которых особое значение имеют те, которые позволяют проводить начальную выставку в процессе полета.
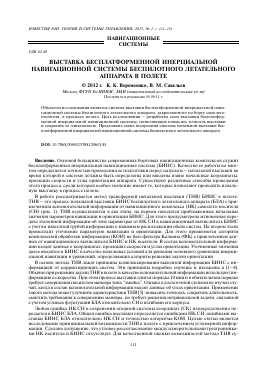
В работе рассматривается метод трансферной начальной выставки (ТНВ) БИНС в полете. ТНВ — это процесс начальной выставки БИНС беспилотного летательного аппарата (БЛА) с привлечением вспомогательной информации от навигационного комплекса (НК) самолета-носителя (СН) (рис. 1). ТНВ осуществляется в два этапа: на первом находятся приближенные начальные значения параметров навигации и ориентации БИНС. Для этого предусмотрена мгновенная передача эталонной информации об этих параметрах от НК СН в навигационный вычислитель БИНС с учетом известной грубой информации о взаимном расположении обеих систем. На втором этапе происходит уточнение параметров навигации и ориентации. Для этого применяется алгоритм комплексной обработки информации (КОИ) на базе фильтра Калмана (ФК) с привлечением данных от навигационного вычислителя БИНС и НК носителя. В состав вспомогательной информации входят данные о координатах, проекциях скорости и углах ориентации. Уточненные значения далее вводятся в БИНС в качестве начальных условий для решения основного уравнения инерциальной навигации и уравнений, определяющих алгоритм решения задачи ориентации.
В основе метода ТНВ лежат принципа комплексирования выходной информации БИНС с информацией от корректирующих систем. Эти принципы подробно изучены и изложены в [1—4]. Обычно при решении задачи ТНВ в полете в качестве вспомогательной информации используют информацию о скоростях. При этом процесс выставки длится порядка 10 мин и в обязательном порядке требует совершения носителем маневра типа "змейка". Однако в достаточной степени не изучен случай, когда в состав вспомогательной информации входят данные об углах ориентации. Применение такого метода может улучшить характеристики ТНВ [5]: повысить точность, сократить длительность, смягчить требования к совершению маневра, но требует решения нетривиальной задачи, связанной с учетом угловых флуктуаций БЛА относительно СН и изгибами его корпуса.
Любая ошибка НК СН в сохранении опорной системы координат (СК) непосредственно передается в БИНС БЛА. Общая ошибка выставки определяется ошибками НК СН, ошибками выставки БИНС БЛА относительно НК СН и точностью алгоритма КОИ. Целью статьи является исследование принципиальной возможности ТНВ в полете с привлечением угломерной информации. Сделано допущение, что угловое рассогласование между измерительными трехгранниками НК носителя и БИНС отсутствует. Для качественной оценки возможностей метода ТНВ су-
Рис. 1
щественны результаты анализа наблюдаемости, который позволяет проследить связь вспомогательных измерений и компонент вектора состояния системы. Для проведения анализа наблюдаемости требуется сформировать модель динамики системы и модель измерений.
1. Модель динамики БИНС БЛА. В исследовании в качестве выставляемой системы рассматривается трехканальная БИНС. Выбранная модель ошибок БИНС подробно описана в [6]. Уравнения ошибок, записанные в форме Коши, удобной для представления модели динамики системы в векторно-матричной форме, в осях географической СК имеют вид
X,
Хб
й2у + П2, - й< - йу
- й - ахйу й + й - ®0
- йу - йхй йх - йу й
2 йс -2йу
-2 й 0
йу - йхй - ййх - йуй й] + й] + 2®0 2йу 2йх
2 йх 0
0 0 0
0 0 0
0 0 0
0 у -в
-у 0 а в -а 0_
0 0 0
АПу
Апс
Хл
х5
Хб
+
(1.1)
й а 0 -йу а Айx
в - -йс 0 йx в + Айу
.У. _йу -й 0 .У. Ай
X
2
X
3
3
X
4
X
5
п
X
+
+
у
с
где географическая СК — СК с началом в центре масс объекта, вертикальной осью, направленной вдоль географической вертикали, и горизонтальными осями, направленными вдоль географической координатной сетки на восток и север; xb x2, x3 — ошибки определения координат и высоты БИНС в географической СК; x4, x5, x6 — производные компонент xb x2, x3 (включают в себя компоненты ошибок БИНС по скорости); а, р, у — угловые погрешности ориентации измерительного трехгранника относительно вычисленного БИНС (компоненты вектора малого поворота ©); ю0 — собственная частота колебаний ошибок БИНС, частота Шулера; Qx, Qy, Qz - проекции вектора абсолютной угловой скорости вращения географического трехгранника; nx, ny, nz -проекции вектора кажущегося ускорения центра масс БЛА на оси географического трехгранника; AQj, Any- (j = x, y, z) — инструментальные дрейфы гироскопов и ошибки акселерометров, приведенные к осям географической СК с помощью матрицы направляющих косинусов C, вид которой описан в [3].
Ошибки инерциальных измерителей в рамках настоящей статьи представляются в виде суммы постоянной и случайной компонент в осях связанной СК:
AQ;. = AQConst + sq; ;
a a const с* ;
Ant = Ant + oHj,
где i = 1, 2, 3 — орты связанной СК с началом в центре масс объекта: ось 1 направлена по строительной оси БЛА, ось 2 — в плоскости вертикальной симметрии БЛА вверх, ось 3 дополняет систему до правой; AQi, Ani - инструментальные дрейфы гироскопов и ошибки акселерометров в
^fr a y^const a const с* С* S
связанной СК; AQ;- , Ant - постоянные погрешности измерителей, oQ(-, o nt - случайные погрешности измерителей в виде несмещенного белого шума. В рамках настоящей статьи ориентация измерительного трехгранника совпадает с направлениями ортов связанной СК.
Для применения ФК составлена модель динамики системы в векторно-матричной форме.
X( t) = F( t) X( t) + G (t) W( t), где вектор состояния системы
X =
15 x 1
Pa /—*const a a", const a / \ const a const a const A const
Y AQj AQ2 AQ3 An1 An2 An3
Матрица динамики системы имеет вид [1—3]
0 3 x 3 E 3 x 3 0 3 x 3 0 3 x 3 0 3 x 3
ji -(QxQy - Q,) -(Qx Q, + Q y) 0 2 Q, -2Qy 0 n, -ny
-(Qx Qy + Q ,) J 2 -(Qy Q, - Q x) -2Q, 0 2 Qx -n, 0 nx 0 3 x 3 C 3 x 3
F(t) = -(Qx Q, - Q y) -(Qy Q, + Q x) j3 2Qy 2Qx 0 ny nx 0
15 x 15 0 Q, -Qy
0 3 x 3 0 3 x 3 -Q, Qy 0 -Q x Qx 0 C 3 x 3 0 3 x 3
0
6 x 15
где j = -(®2 - - Q2), j = -(®2 - Q2 - Q2), j"3 = 2 ®2 + + Q Матрица шумов системы представляется как [1-3]
G (t)
15 x 6
0
3 x 6
0 C
3 x 3 3 x 3
C 0
3 x 3 3 x 3
0
6 x 6
T
Вектор шумов системы содержит следующие компоненты:
- -IT
8^2 8«1 8«2
W( t) =
6 x 1
s г. s
8n3
2. Модель измерений. При решении задачи комплексирования БИНС БЛА и НК СН применяется способ формирования вектора измерений в виде разности выходных сигналов обеих систем, содержащих информацию об одной и той же физической величине. Рассмотрены следующие способы формирования вектора измерений: 1) по разности координат НК СН и БИНС БЛА; 2) по разности проекций скорости; 3) по рассогласовании углов ориентации НК СН и БИНС БЛА; 4) по разности координат и рассогласованию углов ориентации; 5) по разности проекций скоростей и рассогласованию углов ориентации; 6) по разности координат, проекций скоростей и рассогласованию углов ориентации.
В общем виде уравнение измерений при линейном рассмотрении имеет вид
Z( 0 = Н( О Х( 0 + ¥( 0, (2.1)
где Z — вектор измерений, X — вектор состояния, Н — матрица измерений, V — вектор шумов измерений.
В соответствии с (2.1) для предложенных схем выставки вектор измерений формируется следующим образом.
1. Выставка БИНС БЛА по вспомогательной позиционной информации от НК СН. Вектор измерений формируется как разность координат текущего местоположения, вычисленных в БИНС БЛА и НК СН:
Z( t) =
где фБЛА, ^БЛА, йБЛА, фСН, ^СН, йСН — географическая широта, долгота и высота местоположения по показаниям БИНС БЛА и НК СН; 5фБЛА, 5фБЛА, 5йБЛА, 5фСН, 5^СН, 5йСН - ошибки определения соответствующих величин. Учитывая, что сформированные измерения представлены в географических координатах, установим связь между параметрами х1, х2, х3 и ошибками географических координат и высоты:
БЛА CH БЛА 8ф - CH 8ф
ф - ф
^БЛА = 8^бла - 8^CH
БЛА h - hCH _8^ла - 8 hCH_
8^ =
БЛА'
8ф = -2; т R
8 h = x 3,
R cos ф
где R — модуль радиус-вектора местоположения БЛА. Тогда матрица измерений примет вид
Y ^
H( t) =
3 x 15
10 R
R cos ф 0
БЛА
0 0
0 1
0
3 X 12
Ошибки НК СН по координатам и высоте в данной статье представляются в форме белого шума с нормальным распределением, нулевым средним значением и формируют вектор шумов измерений V(t) = [5фСН 5^СН 5йСН]Т.
2. Выставка БИНС БЛА по вспомогательной скоростной информации от НК СН. Вектор измерений формируется в виде разности относительных скоростей, вычисленных в БИНС БЛА и НК СН:
yfA - VCH 8 VfA - 8 Vf
Z( t) = Т/БЛА VNh = 8 VfA - 8 VnH
БЛА JR - vCh 8 VfA - 8 VCH
где У^, У^, , У^ , УуН , У^ — проекции относительной скорости полета БЛА и СН на
оси географической СК; 5УБЛА, 5УТ, 5УБЛА, 5УТ, 5У^, 5УСН — ошибки вычисления соответствующих проекций скорости. Выражения для вычисления погрешностей определения составляю
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.