ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2015, № 4, с. 155-159
СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖУЩИМИСЯ ОБЪЕКТАМИ
УДК 531.1
ЗАДАЧА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СПУТНИКА ПРИ ПОМОЩИ РАЗНЕСЕННЫХ СПУТНИКОВЫХ АНТЕНН И ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ © 2015 г. А. Джепе, А. В. Козлов, А. А. Никулин
Москва, МГУ, лаборатория управления и навигации Поступила в редакцию 17.11.14 г., после доработки 15.01.15 г.
Приводятся модели возникающей задачи оценивания в рамках схемы с тесной интеграцией данных СНС-ДУС. На примере модельного траекторного и углового движения спутника Университетский-Татьяна-2 приводятся некоторые оценки точности интегрированных навигационных решений.
DOI: 10.7868/S0002338815030051
Введение. Задача интеграции датчиков угловой скорости (ДУС) и приемника сигналов спутниковых навигационных систем (СНС) с несколькими разнесенными на корпусе объекта антеннами актуальна для определения углового положения спутника на орбите. Обсудим особенности этой задачи с информационной точки зрения.
Система разнесенных спутниковых антенн является источником информации двух типов: позиционной и скоростной информации о движении точки — фазового центра опорной (базовой) антенны, и информации о положении корпуса объекта опосредовано через оценки координат базовых векторов, соединяющих фазовые центры антенн. Датчики угловой скорости позволяют оценить изменение ориентации в пространстве.
Известны два типа интеграции спутниковых и инерциальных навигационных систем: слабосвязанные системы и тесно (глубоко) интегрированные системы. С информационной точки зрения в первом варианте для интеграционных решений используется вторичная информация СНС — координаты, скорости, а в случае многоантенной СНС — также углы рысканья (истинного курса), крена, тангажа (при трех и более разнесенных антеннах с геометрией, обеспечивающей обусловленность задачи). При наличии двух разнесенных антенн, установленных вдоль продольной оси объекта, возможно определение только углов рысканья и тангажа.
Во втором варианте в интеграционных алгоритмах используются первичные спутниковые измерения — кодовые псевдодальности, доплеровские псевдоскорости и фазовые измерения, полученные как от базовой антенны, так и от других разнесенных антенн. Преимущество второго подхода состоит в том, что возможна комплексная обработка спутниковой информации в случае малого числа видимых спутников, когда вторичная информация СНС не формируется. Модели интеграции инерциальных навигационных систем и одноантенной СНС хорошо известны и описаны, например, в [1]. Специфика задачи тесной интеграции ДУС-СНС с разнесенными антеннами состоит в использовании первичных фазовых спутниковых измерений от нескольких антенн. Опишем соответствующие модели.
1. Общая постановка задачи. Методически задачи тесной интеграции в той или иной форме сводятся к решению линейной стохастической задачи оценивания общего вида
dx(t) = A(t)x(t) + q(t), z(t) = H(t)x(t) + r(t). (1.1)
dt
Здесь x — вектор состояния, компонентами которого являются:
ошибки определения ориентации спутника,
параметры инструментальных погрешностей инерциальных датчиков — ДУС,
целочисленные неопределенности фазовых измерений,
А — матрица линейной динамической системы, z — вектор измерений, Н — матрица измерений, д — вектор случайных погрешностей динамической системы, г — вектор случайных погрешностей измерений.
Модели матричных параметров А, Н основаны на моделях уравнений ошибок ориентации и линеаризованных моделях первичной спутниковой информации. Для определенности остановимся на стандартной калмановской постановке задачи оценивания (1.1). Будем считать, что случайные погрешности описываются векторным случайным процессом типа белого шума с заданной интенсивностью и нулевым математическим ожиданием.
2. Модельные уравнения ориентации объекта. Ориентацию объекта будем характеризовать матрицей ориентации С, связанной с корпусом объекта системы координат Мз (М — начало координат, 5 — ее наименование) относительно опорного гринвичского трехгранника Оц, традиционно используемого в задачах спутниковой навигации. Углы ориентации однозначно определяются по элементам этой матрицы. Для оценки С матрицы ориентации С в вычислителе навигационной системы численно интегрируется кинематическое уравнение Пуассона
С' = со' С - С' и (2.1)
с использованием измерений ю' датчиков угловой скорости и заданных начальных условий С '(?0). Здесь и далее *' (штрих) используется для обозначения результатов измерения или вычисления по измеренным величинам,
0 ю3 -ю2
ю' = -ю'3 0
ю2 -Ю 0
— кососимметрическая матрица, поставленная в соответствие измеренному вектору абсолютной
угловой скорости объекта ю' = [©1 ©2ю'3]Т, матрица и — строится аналогично по вектору и = [0 0 и3]т угловой скорости вращения Земли, и3 ~ 15.041 град/ч.
Введем ошибку V измерений ДУС (гироскопический дрейф) и вектор малого поворота Р(?), характеризующий ошибку модельной матрицы ориентации С(1) [2]:
ю' = ю — V, С = (Е + (3)С'.
Здесь Е — единичная матрица размера 3 х 3, [3 — кососимметрическая матрица, поставленная в соответствие вектору р.
В линейном приближении справедливо уравнение [2]
в = ю' р + V. (2.2)
Для гироскопического дрейфа V будем использовать простейшую модель, когда эта погрешность представляется суммой неизвестной постоянной и белого шума:
V = V 0 +др. (2.3)
Здесь — векторный случайный процесс типа белого шума с заданной интенсивностью и нулевым математическим ожиданием.
3. Модели линеаризованных измерений СНС. Ниже не будут описаны модели спутниковых измерений в случае использования кодовых псевдодальностей, доплеровских псевдоскоростей от базовой антенны, полагая, что такие модели хорошо известны (см., например, [1]). Опишем только коррекционные модели дифференциальных комбинаций фазовых измерений от разнесенных антенн, отражающих специфику рассматриваемой интеграционной задачи ДУС-СНС.
Используем упрощенную модель фазового измерения , полученного на]-й антенне для 1-го спутника, так как приемники находятся вне атмосферы Земли [3]:
Z =Р- + / (Дт-Д Т,) + Н{ + Дф/.
Л
ЗАДАЧА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СПУТНИКА
157
Здесь р/ — расстояние между]-й антенной и /-м спутником, X,/ — длина волны и частота радиосигнала, Ах, Д Т — погрешности часов приемника и спутника, N { — целочисленная неопределенность фазового измерения, Дф— случайная погрешность фазового измерения.
В осях связанной с корпусом объекта системы координат Мз известны координаты всех базовых векторов ¡^, соединяющих фазовые центры антенн. С помощью модельной матрицы ориентации С системы координат Мз' относительно гринвичского трехгранника определим модельные значения этих векторов в гринвичских осях Оц:
1'к _ с 'т /к
Далее осуществим два преобразования.
1. Сформируем так называемые вторые разности фазовых измерений: AZ^ = Z^ - Z^ - (Z^ - Z^), где индекс m обозначает опорную (master) антенну, к —любую другую (slave) антенну, 0 — ведущий спутник. Считается, что в данных измерениях взаимно компенсируются систематические ошибки Дх, AT*. Полученные разности пропорциональны проекции базового вектора на разность направляющих векторов:
AZk. -1
ф' = Х
/ sat, \ T / sato \ T
(п ' - п) (п 0 - п)
р'
ро
Ik + ANk + Дф*.
(3.1)
Здесь цаа',п — координаты спутника и объекта в гринвичских осях Оц, АЙк,Дф* — вторые разности целочисленных неопределенностей и шумов измерений.
2. Сформируем измерения в "малом": AzЩ = AZЩ - AZ,k
, где Д Z^ — вычисленный с помо-
щью спутниковых решений полезный сигнал первой разности Az,
Д Z,
ф'
X
/ sat - i \ T / sato »\T
(n ' - n ) (n 0 - n )
p'
p 0
Тогда получим
л к 1
к
z sat - i\ T / sato »\T
(n ' - n ) (n 0 - n )
/П кв + ANk + Дф*.
(3.2)
Р1 Ро
Измерение (3.2) может быть сформировано для любого сочетания двух и более спутниковых антенн. Особенностью модели (3.2) и соответственно задачи оценивания (1.1) являются неизвестные целые числа АЙк. Для разрешения целочисленных неопределенностей АЙк используется такой подход. Сначала с помощью алгоритма оценивания, например фильтра Калмана, определяются так называемые Аоа^оценки целочисленных неопределенностей АЙк и их ковариации РАЙ, а затем с помощью известного LAMBDA-метода [4], суть которого состоит в оптимизации перебора по множеству целочисленных векторов за счет преобразования весовой матрицы РАЙ, решается следующая оптимизационная задача:
ANz = arg min
ANk - ANNk
(3.3)
A N e Z
Zn — множество целочисленных векторов размерности п. Далее компоненты ДЙг, полученные в результате решения задачи (3.3), вычитаются из измерений (3.2) и соответственно исключаются из вектора состояния задачи оценивания (1.1).
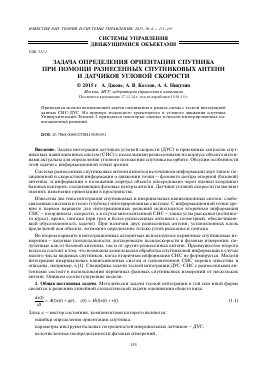
4. Моделирование. С целью исследования оцениваемости вектора состояния системы, заданной уравнениями (2.2), (2.3) по измерениям (3.2), было проведено численное моделирование. За основу были взяты характеристики траекторного и углового движения спутника Университет-ский-Татьяна-2 [5].
Параметры орбиты: большая полуось — 7210220 м, эксцентриситет — 0.00321, наклонение орбиты — 98.8 град.
к
100
3 р
1-е
к
и
я
се н я
(U
и р
о
и
м
VO
и
о
О 10-^
U
/ -ß1 _._ß2 ß
I........
!\ Л
Ж,
у _ V ...... .....^ Л А
........¡"........ ...... Ч ......
500
1000
1500 2000 Время, с
2500 3000 3500
Рис. 1. СКО ошибки ориентации при использовании трех антенн
1
0
Движение спутника вокруг центра масс задавалось тремя углами поворота относительно орбитальной системы координат в соответствии с [5]:
¥(() = 305 {+ 20° 970
Ф(0 = Apsin(®^i + аv) A ~ 0,5
2п
Щ = As sin(®si + аs) ю3 « — град/с,
600
Аф, А3 — амплитуды изменения углов ф и 9 соответственно, ю3 — частоты изменения углов ориентации, а а 3 — начальные фазы.
Моделировались первые разности фазовых измерений в соответствии с (3.1) с постоянными неоднозначностями и случайными погрешностями со среднеквадратичным отклонением порядка 0.01 м. Уравнение Пуассона (2.1) интегрировалось с использованием модельных измерений ДУС с ошибками начальной ориентации порядка 1 град. Ошибка показаний ДУС моделировалась в
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.