Малистов А. С., кандидат технических наук, зам. руководителя отдела ЗАО «ЭЛВИС-НеоТек» Злобин Д. О.
(Национальный исследовательский университет (МИЭТ))
АЛГОРИТМ И АНАЛИЗ ПОГРЕШНОСТИ ОПРЕДЕЛЕНИЯ СКОРОСТИ АВТОМОБИЛЯ ОДНОКАМЕРНОЙ КОМПЬЮТЕРНОЙ ВИДЕОСИСТЕМОЙ
Статья описывает однокамерную систему видеонаблюдения, позволяющую оценить скорость движущегося транспортного средства. Оцениваются погрешности, которые возникают при использовании такой системы видеонаблюдения.
This paper describes a surveillance system that consists of a single camera and allows estimating the speed of a moving vehicle by LPR algorithm. We estimate errors that occur when using this surveillance system.
Оценим, насколько точно можно определить скорость движущегося автомобиля с помощью однокамерной системы видеонаблюдения. Средняя скорость определяется по формуле
5
V = дг, где ^ - пройденный путь, AT - время в пути. Определить пройденный автомобилем
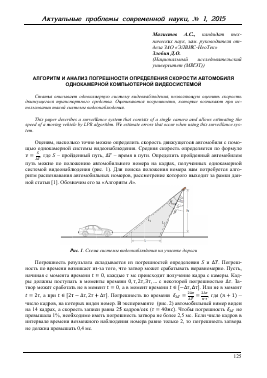
путь можно по положению автомобильного номера на кадрах, полученных однокамерной системой видеонаблюдения (рис. 1). Для поиска положения номера нам потребуется алгоритм распознавания автомобильных номеров, рассмотрение которого выходит за рамки данной статьи [1]. Обозначим его за «Алгоритм А».
Погрешность результата складывается из погрешностей определения Б и ДТ. Погрешность по времени возникает из-за того, что затвор может срабатывать неравномерно. Пусть, начиная с момента времени £ = 0, каждые т мс происходит получение кадра с камеры. Кадры должны поступать в моменты времени 0, т, 2т, 3т,... с некоторой погрешностью Дт. Затвор может сработать не в момент £ = 0, а в момент времени £ £ [-Дт, Дт]. Или не в момент
£ = 2т, а при £ £ [2т — Дт, 2т + Дт]. Погрешность по времени 5ДТ = -Дт- = ^Д-, где (п + 1) -
число кадров, на которых виден номер. В эксперименте (рис. 2) автомобильный номер виден на 14 кадрах, а скорость записи равна 25 кадров/сек (т = 40мс). Чтобы погрешность 5ДТ не превышала 1%, необходимо иметь погрешность затвора не более 2,5 мс. Если число кадров в интервале времени возможного наблюдения номера равно только 2, то погрешность затвора не должна превышать 0,4 мс.
л
У
Рис. 2. Проезд автомобиля: кадр №437 (слева) и кадр №450 (справа)
Вернемся к рисунку 1. Камера имеет угол обзора между Ртах и атах. Автомобиль проходит в поле зрения камеры некоторый путь Б от точки, где автомобильный номер был обнаружен впервые под некоторым углом до точки, где номер был обнаружен в последний раз под углом а. Пусть К — разница между высотой установки камеры и высотой положения номера, тогда
5 = К (^ОЮ - 1д(а)) (1)
Погрешность 8$ складывается из погрешностей вычисления К и вычисления углов. Неопределённость значения К возникает из-за того, что неизвестна точная высота установки номера (рис. 3). Значение К можно оценить двумя способами: по средней высоте установки номера или по ширине номерной пластины. Однако, погрешность определения ширины номера алгоритмом А может оказаться более 10% из-за дискретного представления изображения, недостаточной фокусировки или неточного распознавания границ номерной пластины. Поэтому определим К как среднее арифметическое К = (К + К2)/2, где К± и К2 — разницы между высотой установки камеры и высотой верхнего и, соответственно, нижнего из возможных положений автомобильного номера. Тогда ДК = (К2 -К1)/2, и относительная погрешность 5Н = — = Например, при К± = 5,6м, К2 = 6м получаем 5Н « 40%. Для боль/1 /Х^+Л^
ших К можно получить меньшую погрешность, но на практике монтаж камер на большой высоте ухудшает распознавание автомобильного номера.
УШ max угол Sy' f / зрения /у' f / / /1/ s2 1/ k Ь2 hi
у6 . / / u :' "У 1 / с 1 / / mmv™
Рис. 3. Изменение угла зрения номерного знака при различной высоте установки
Из-за дискретного представления изображения алгоритм А не может точно очертить автомобильный номер и вместо верного угла Р мы получаем его неточную оценку р' (рис. 4). Пусть ^Япикс и dH - погрешность алгоритма А [пиксели и метры], Япикс и Н - высота номера [пиксели и метры], К - расстояние вдоль дороги от места установки камеры до точки, где обнаружен номер (К > S). Тогда dH = ^Япикс • Я/Япикс. Рассмотрим ААВС (рис. 4). В нём СВ = dH - погрешность, которую допускает алгоритм А, а АВ - это погрешность вычисления К из-за ошибки алгоритма: АК = АВ = СВ tg ft = dH tg p. Заметим, что АК ^ mHx ^ p » pmax, а tg pmax » Kmax/h, где Kmax - расстояние до дальней точки обзора. Относительная погрешность расстояния, которая возникает из-за неопределённости углов р и
а, равна 8К = = 2 *^Япикс_я. в эксперименте, в котором ^Япикс « 3пкс, Япикс « 10пкс,
Kmax ^пикс'"
Я = 112 мм, h « 6м, Ктах « 40 м, мы получаем 5К « 0.6%. Погрешность определения пройденного пути S будет выше, так как S < К. Зависимость выражается формулой AK/S = 8К • K/S. Для близких расстояний и широкоугольных камер, когда S составляет существенную долю от К, погрешность невысока. Однако, для длиннофокусных объективов измерение скорости указанным способом становится затруднительным. Для нашего эксперимента, в котором расстояние до дальней точки обзора составляет 40 метров, получаем с учетом погрешности Sh, что относительная погрешность Ss ограничится 5%: основной вклад вносит погрешность определения высоты установки номерной пластины.В этой статье были оценены погрешности, возникающие при определении скорости движущегося транспортного средства с помощью однокамерной системы видеонаблюдения. Основной вклад в приведённую погрешность определения скорости автомобиля вносит неизвестность высоты установки номерной пластины. Вторая составляющая погрешности — неточность работы алгоритма определения положения номера в кадре, дающая незначительный вклад для широкоугольных объективов. Наконец, третья составляющая общей погрешности — неравномерность срабатывания затвора, которая зависит от модели используемой камеры. Таким образом, применяя однокамерные системы видеонаблюдения для определения скорости движущегося транспортного средства, в некоторых указанных условиях можно обеспечить погрешность определения скорости в пределах в 5-10%.
Литература
Anagnostopoulos I.E., Loumos V., Kayafas E, A License Plate-Recognition Algorithm for Intelligent Transportation System Application, Intelligent Transportation Systems, Vol. 7, Issue 3, 2006.
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.