ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 4, 2014
МЕХАНИКА МАШИН
УДК 519.61,62-231,621.81
© 2014 г. Крейнин Г.В.1, Мисюрин С.Ю.2, Нелюбин А.П.1
ЧИСЛЕННОЕ РЕШЕНИЕ ЗАДАЧИ О ПОЛОЖЕНИИ 5-РЫЧАЖНОГО МЕХАНИЗМА ПОДВЕСКИ АВТОМОБИЛЯ
1 Институт машиноведения им. А.А. Благонравова РАН, г. Москва 2 Национальный исследовательский ядерный университет "МИФИ", г. Москва
Рассмотрены проблемы, возникающие при численном решении задачи о положении пространственного многозвенного механизма. Решена проблема получения численного решения в окрестности особого положения. Предложенный метод численного решения демонстрируется на примере 5-рычажного механизма подвески автомобиля. Используется математический аппарат — многомерный метод Ньютона и регуляризация. Рассматриваются кинематические характеристики подвески, влияющие на качество работы всего механизма управления автомобиля.
Многозвенная структура подвески автомобиля может предложить лучшее соотношение между управляемостью, безопасностью, комфортом и занимаемым пространством. Такая структура обеспечивает высокую жесткость в поперечном направлении и достаточную податливость в продольном направлении. Впервые 5-рычажная (5-звен-ная) подвеска была запатентована Mercedes Benz в конце 1980-х годов. С тех пор многозвенные подвески стали все чаще и чаще использоваться на современных седанах и купе, как на задней, так и на передней оси. Ее конструкция не определена точно и различается в разных моделях. В настоящей статье будем рассматривать конструкцию подвески Honda Accord, которая является развитием подвески типа double wishbone.
Численное моделирование движения подвески автомобиля позволяет автоматизировать ее проектирование и сокращать число натурных экспериментов. Например, в [1] был смоделирован маневр смены полосы движения для оптимизации критериев комфорта и управляемости. В [2, 3] оптимизировали эластокинематические и динамические характеристики 5-рычажной подвески.
В настоящей статье рассмотрим некоторые важные кинематические характеристики подвески автомобиля, такие как углы схождения и развала, продольные и поперечные смещения [4, 5]. Значения этих характеристик и их изменений при ходах сжатия и отбоя влияют на управляемость, курсовую устойчивость автомобиля, комфорт, износ шин и т.д.
При кинематическом анализе механизма подвески требуется решить систему полиномиальных уравнений. В [6] сделали обзор трех точных вычислительных методов для решения таких систем. Это базис Грёбнера (аналитический), полиномиальное продолжение (численный) и диалетическое удаление (гибридный). Процедура диалетиче-ского удаления очень полезна только для задач небольшой размерности, до шести пе-
ременных. Недостатком метода построения базиса Грёбнера является большой объем вычислений из-за большого числа генерируемых промежуточных полиномов.
Тем не менее в [7] удалось построить базис Грёбнера для триангуляризации уравнений кинематических ограничений. Их подход был применен к платформе Стюарта-Го и к 5-звенной подвеске. Поскольку эти механизмы топологически схожи, разумно рассмотреть их одновременно. Хотя прегенерация базиса Грёбнера и привлекательна с точки зрения приложений реального времени, она требует вычислительных затрат и индивидуального подхода к каждой задаче.
В [8] использовали интервальный анализ для построения всех возможных траекторий, соответствующих заданному диапазону значений свободного параметра. Они показали, что вычислять аналитические выражения для выходных параметров не практично, даже для простейшего механизма Макферсона.
Найдем кинематические характеристики, следуя по траектории механизма подвески от сжатия до отбоя. Систему полиномиальных уравнений, возникающую при анализе кинематики 5-рычажного механизма, будем решать численно с помощью многомерного метода Ньютона. Это стандартный подход при следовании по траектории механизма и можно использовать результаты, полученные на предыдущем шаге траектории в качестве начального приближения метода Ньютона на следующем шаге.
Кинематические характеристики. По заданному ходу подвески определяются координаты ее характерных точек, через которые выражаются различные кинематические характеристики подвески: углы схождения и развала колеса, продольное и поперечное смещения.
Развал у применяется для улучшения бокового сцепления колес с поверхностью при прохождении поворотов. Наилучшая зависимость угла развала от хода подвески следующая: при ходе сжатия ^ угол развала должен быть как можно меньше, а при ходе отбоя s2 как можно больше [4]
Ki = (у(S2) - Y(si)) — max.
При положительном схождении 8 на колеса во время движения действуют стабилизирующие боковые силы. При этом для устойчивости желательным является как можно меньшее изменение угла схождения [4]
K2 = А8 —»> min.
Здесь и далее А — разность между максимальным и минимальным значениями соответствующей величины на всем диапазоне хода подвески.
База L и колея b колес влияют на маневренность, курсовую устойчивость и проходимость [4, 5]. Минимальные изменения колеи (поперечное смещение), базы (продольное смещение), а также угла схождения способствуют не только лучшей управляемости, но и меньшему износу шин
K3 = Ab—»- min, K4 = AL—»- min.
Все эти индексы можно использовать в качестве критериев оптимальности при настройке параметров проектирования на стадии синтеза.
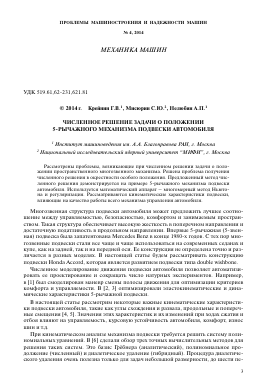
Рассмотрим кинематическую схему 5-рычажной подвески, изображенную на рисунке. Система координат Oxyz связана с корпусом автомобиля, а ее начало помещено в центре колеса в конструктивном положении (нулевой ход колеса) так, что координаты креплений A0, B0, C0, D0 и F0 подвески к корпусу автомобиля фиксированы. Все пять рычагов имеют постоянные длины. Ось вращения ON колеса и носитель колеса (подвижная платформа) ABCDF считаются одним твердым телом. Точка E — точка контакта колеса с поверхностью дороги. Эта система имеет одну степень свободы, задаваемую вертикальной координатой zO = s (ход подвески) центра колеса O.
Искомые кинематические характеристики можно выразить следующим образом:
2 2 -1/2
tg Y = (zN - Zo )-((xn - xo) + (Ум - Уо)) ; (1)
tg 8 = (%N - Хо )-(yN - Уо Г1; A b = a Ув'; aL = AxE-
Для нахождения их изменений на всем ходе подвески будем следовать по траектории механизма от его начального положения (5 = 0) к максимальному ходу сжатия (s: = 100 мм), а затем к максимальному ходу отбоя (s2 = —100 мм) с шагом 1 мм. Примерные начальные координаты (в мм) вершин рассматриваемого механизма Уатта в 5-рычажной подвеске Honda [9] представлены в таблице.
Эти параметры в начальном положении определяют конструкцию механизма и его траекторию. Конструкцию можно использовать в качестве прототипа в процедурах синтеза и оптимизации.
Численное решение задачи кинематики. Процедура следования по траектории требует решения прямой задачи кинематики: по заданному ходу s найти положение механизма подвески, т.е. координаты точек O, E, N, A, B, C, D и F. При этом достаточно найти координаты точек O, A, B, C, D, F, а затем независимо вычислить координаты точек E и N. Таким образом, необходимо найти 17 неизвестных координат, решая систему из 17 нелинейных ограничений на постоянство длин A0A, AB, B0B, AC, BC, C0C, AD, BD, CD, D0D, AF, BF, CF, F0F, AO, BO, CO. Пронумеруем эти ограничения в том же порядке, что и перечисленные длины. Выпишем лишь часть из них
fi(хл> Ул> Za) = 1 ((xA -хао)2 + (Ул -УаО)2 + (Za - ZaÜ)2 - \М2) = 0;
1 2 2 2 2 f2( xA> Ул> Za, xB> Ув> Zb ) = 2((xB - Хл) + (Ув - У л) + ( Zb - Za) - \AB\ ) = 0; (2)
1 2 2 2 2 fu(xo Уо Zc, Хо> Уо) = 2((x0 -Хс) + (Уо -Ус) + (Zo - Zc) - \CO\ ) = 0-
A0 B0 C0 D0 F0 A B C D F
X 304 159,6 -353,4 -53,2 -60,8 22,8 159,6 -110,2 -53,2 -60,8
y 370,5 497,8 418 418 380 87,4 163,4 106,4 76 121,6
z 180 20 -30 -45 195 200 20 -50 -50 210
Множитель 1/2 введен для удобства дальнейших вычислений. Каждая нелинейная функция/¡, I = 1, ..., 14 зависит от трех или шести неизвестных координат (последние три функции будут зависеть от пяти неизвестных, так как 1о = 5 задано).
Решим систему (2) численно с помощью многомерного метода Ньютона [10, 11]. Это итеративная процедура, вычисляющая последовательные приближения к решению. Естественно использовать предыдущее положение механизма на траектории в
качестве начального приближения х° = (х..., х07). Каждое следующее приближение X +1 находят путем решения уже линейной системы алгебраических уравнений 17
i = 1 17
Jii(x )Zi = -fi(xk),
(3)
J17i(* )Zi = -f17(x") , гДе Jji(= ^Цт ,
T j.
i = 1
dXf
i, j = 1, ..., 17 — элементы матрицы Якоби системы (2).
Решением линейной системы алгебраических уравнений (3) является вектор при-
к + 1 к ращений z, так что x = x + z .
Проверка в общем виде условий сходимости метода очень трудоемка, поэтому на практике ограничиваются более простым правилом. Итерационный алгоритм завершается, когда погрешность не превосходит заданное малое число е. Используем следующее правило:
max (Id)< 0,005 мм. (4)
i = 1,..., 17
Если алгоритм не сходится, то должно быть предусмотрено максимальное число итераций K, при достижении которого алгоритм принудительно завершается. Такое возможно рядом с особыми положениями [8, 12, 13], где две или более траекторий проходят рядом друг с другом. В таких областях матрица Якоби J плохо обусловлена или вырождена (singular). В [8] была использована теорема Канторовича для того, чтобы обеспечить сходимость решения методом Ньютона к той же ветви траектории. В настоящей статье для этих целей используем технику регуляризации по Тихонову. В отличие от [8] не нужно находить все ветви траекторий, а только ту, что соответствует начальному положению механизма. Если две или более ветви пересекаются, то такую конструкцию следует исключить из рассмотрения при проектировании.
Для построения матрицы Якоби системы (2) достаточно вычислить только три
частные производные функцийf, i = 1, ..., 17, так как, например, (i = 2)
f = _ = f = f =
dxA A B дхв дУл дУв д?-л д?-в'
Поэтому обозначим через J'1, fi2 , fl3, i = 1, ..., 17 частные производные функции f по координатам той точки, которая расположен
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.