КОСМИЧЕСКИЕ ИССЛЕДОВАНИЯ, 2014, том 52, № 3, с. 229-241
УДК 531.36
ДИНАМИКА И УПРАВЛЕНИЕ ХАОСОМ АСИММЕТРИЧНЫХ
СПУТНИКОВ-ГИРОСТАТОВ
© 2014 г. В. С. Асланов, В. В. Юдинцев
Самарский государственный аэрокосмический университет им. академика С.П. Королёва aslanov_vs@mail.ru; yudintsev@classmech.ru Поступила в редакцию 06.06.2011 г.; после переработки 26.07.2013 г.
Рассматривается движение свободного спутника-гиростата, состоящего из платформы с трехосным эллипсоидом инерции и ротора с малой асимметрией относительно оси вращения. В переменных Андуайе—Депри получены безразмерные уравнения движения системы с возмущениями, обусловленными малой асимметрией ротора. Эти возмущения приводят к возникновению в окрестности сепаратрисы хаотического слоя. Для гиростатов с различными соотношениями моментов инерции приведены гетеро- и гомоклинические траектории в аналитическом виде, с помощью которых формируется модифицированная функция Мельникова и определяется управление малым внутренним моментом, исключающее хаос. Путем численного моделирования построены сечения Пуанкаре и функции Мельникова, показывающие эффективность сформированного управления.
DOI: 10.7868/S0023420614030017
1. ВВЕДЕНИЕ
Исследованию движения гиростатов и спутников-гиростатов посвящено большое количество работ [1—14], так в монографии J. Wittenburg [1] представлены уравнения движения гиростата, состоящего из двух или нескольких тел и даны аналитические решения динамических уравнений свободного гиростата. В работах C. Hall и R. Rand [2, 3] рассматривается динамика движения свободного гиростата с осесимметричным ротором под действием малого внутреннего момента. В J. Cochran [4] для асимметричного гиростата найдены аналитические решения для динамических переменных и решения в квадратурах для углов Эйлера. В. Аслановым в [5, 6] получены безразмерные уравнения движения гиростата с осесим-метричным ротором и построены аналитические решения в эллиптических функциях Якоби для различных видов его эллипсоида инерции и для различных режимов движения. В работе В. Сары-чева и С. Мирера [8] исследуется устойчивость стационарных режимов движения спутника-гиростата. Хаотическое движение гиростатов рассматривается в работах [9—16]. В статьях В. Асланова и А. Дорошина [10], J. Peng и Y. Liu [12] изучено поведение различных типов гиростатов с асимметричным ротором с помощью метода Мельникова [17], модифицированного S. Wiggins и P. Holmes [18, 19], и показано возникновение хаотического слоя вблизи сепаратрисы. Возможность возникновения хаотических режимов непосредственно связана с асимметрией ротора и появлением в уравнениях движения дополни-
тельных малых возмущений. В работах M. Inarrea и V. Lanchares [14, 15] изучаются хаотические режимы движения спутников-гиростатов с изменяющимися по периодическому закону моментами инерции. Обзор работ, посвященных задачам управления хаосом, приведен в [20]. Среди них отметим статью L.-Q. Chen и Y.-Z. Liu [21], где исследуются хаотические режимы движения космического аппарата в магнитном поле Земли и решается задача стабилизации заданного периодического движения.
Настоящая статья посвящена рассмотрению движения гиростата с малой асимметрией ротора и формированию закона управления малым внутренним моментом, устраняющего хаотическое поведение, свойственного гиростатам этого типа.
2. УРАВНЕНИЯ ДВИЖЕНИЯ
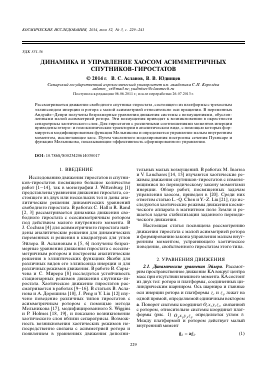
2.1. Динамические уравнения Эйлера. Рассмотрим пространственное движение КА вокруг центра масс при отсутствии внешнего момента. КА состоит из двух тел: ротора и платформы, соединенных цилиндрическим шарниром. Ось шарнира и главные оси инерции ротора и платформы zr и zp лежат на одной прямой, определяемой единичным вектором a. Поворот системы координат Orxryrzr, связанной с ротором, относительно системы координат платформы (рис. 1) Opxpypzp определяется углом 5. Между платформой и ротором действует малый внутренний момент
g 8 = ag8. (1)
ротор Уг
— + щ. X G = 0, dt p
(2)
где ю р — угловая скорость платформы, О — вектор кинетического момента системы относительно ее центра масс
в = J • юр + Ога, (3)
I — тензор инерции системы относительно ее центра масс, который складывается из тензора инерции платформы и ротора
J ^ J p + Jr,
(4)
Ог — кинетический момент ротора относительно платформы
Ог = Сг 5, (5)
Сг — момент инерции ротора относительно оси вращения, 5 — угловая скорость ротора относительно платформы.
Запишем уравнение (2) в проекциях на оси системы координат связанной с платформой и рас-
положенной в центре масс системы — Ох'ру'р^р. Направление осей этой системы совпадает с направлением осей системы координат, связанной с платформой Орхрур1р. Тензор инерции системы, определяемый выражением (4), складывается из тензора инерции платформы и ротора, которые в собственных базисах, относительно центров масс платформы Орхрур1р и ротора ОгхгУЛг, обозначаются как Iр и Iг соответственно. Полагаем, что в собственных базисах тензоры инерции платформы и ротора имеют диагональный вид
Iр = diag(Aip,Вр,Ср), Iг = diag(Д.,Вг,Сг). (6) Для записи тензора инерции системы в базисе Ох'ру'р1р используем правило преобразования компонент тензора инерции [1]
Jp = Jp + (rpcrpcE rpcrpc) mp,
J r = A p
Рис. 1. Системы координат.
Вывод уравнений движения основывается на теореме об изменении кинетического момента системы, который в этом случае имеет вид:
(J r + (
Р E - Р
ГгеГгеЕ ГгеГге
) mr) A
(7)
(8)
где тр — масса платформы, тг — масса ротора, грс — радиус-вектор, соединяющий центр масс платформы с центром масс системы, гге — радиус-вектор, соединяющий центр масс ротора с центром масс системы
\Р
= (0 0 Zp) , гге = (0 0 Zr) .
(9)
Матрица поворота A pr из системы координат Orxryrzr в систему Opxpypzp определяется следующим образом:
f cos 5 - sin 5 0^
A pr =
sin 5 cos 5 0 0 0 1
(10)
У
А рг — матрица, транспонированная матрице А . Учитывая (7), тензор инерции платформы в базисе Ох'рур1р будет иметь вид:
( 2 z mpZp + Ap
0 0
0
mpZ2p + ¡Bp
0
0 0
C p
(Ap 0 0 0 Bp 0 v0 0 Cp J
(11)
Подставляя (10), (6) в (8) получим тензор инерции ротора относительно центра масс системы:
J
^Ar cos2 5 + mrzp + Br sin2 5 (Ar - Br)cos 5 sin 5 0
(Ar - Br)cos 5 sin 5 0 Br cos2 5 + mrzp + Ar sin2 5 0 0 Cr
(12)
J
Моменты инерции ротора Аг, Бг, Сг относительно базиса, расположенного в центре масс системы, оси которого параллельны соответствующим
осям ОгхгУЛг, определяются следующими соотношениями:
J rc —
( 2 mrzr + Ar
0 0
0 0
mrzr + Br 0 0 Cr
( A 0 0 ^
0 Br 0
1 0 0 Cr
Тогда тензор инерции ротора имеет вид:
Т = A TA =
r pr rc pr
^Ar cos2 5 + Br sin2 5 (Ar - Br)sin 5 cos 5 0 (Ar - Br)sin 5 cos 5 Ar sin2 5 + Br cos2 5 0 0 0 C„
Учитывая структуру тензора инерции платфор- зисе Охру/р будет иметь внедиагональные эле-мы и ротора, тензор инерции всей системы в ба- ментьг
(13)
Í 2 2
Ap + Ar cos 5 + Br sin 5 (Ar - Br)sin5cos5 0 J = (Ar - Br)sin5cos 5 Bp + Ar sin2 5 + Br cos2 5 0
0 0 Cp + Cr
Jx -Jxy 0 -Jxy Jy 0
v 0 0 Jzj
Проекции кинетического момента системы на оси Ox'py'pzp обозначим как
G = (Gx, Gy, Gz). (14)
После подстановки (14), (13) в уравнение (2) и получим систему скалярных дифференциальных уравнений:
Gx =
Gy (Jxy JxJy ) Gr Gz (GxJzJxy + Gy (Jxy + Jx (jz Jy ))) J (J J -J2) '
J z\J xJ y J xy I
Gz (GyJzJxy + Gx ( + Jy (JZ - Jx))) GxGr
Gy = T T T2 +
Gz =
Jz (JxJy Jxy ) _ GxGy (Jx - Jy ) + (( Gy ) Jxy
J J - J
° x° y ° xy
Jz
(15)
Отметим, что согласно (13) динамические уравнения движения (15) зависят от угла поворота ротора относительно платформы, поэтому данная система должна быть дополнена, уравнениями, описывающими относительное вращение, что будет сделано далее.
Если рассматривается КА с осесимметричным ротором Аг = Бг, тогда тензор инерции (13) приобретает вид
Ap + Ar 0 0 1 f Jx 0 01
J = 0 Bp + Ar 0 = 0 Jy 0
1 0 0 C + C ^p ~ r 1 0 0 Jz J
В этом случае угол относительного вращения 5 не входит в динамические уравнения (15), которые принимают известный вид [2, 4, 23]:
GG = GyGz (Jy - Jz) - GyGr
x J J J '
J yJ z Jz
G = GxGz (Jz - Jx) + GxGr
G z =
J xJ Z
GxGy (Jx - Jy)
JxJy
Jz
6 =
< 1,
Gx = V G2 - L2 sin l,
G,
L cos l,
Gz = L,
(19)
(20)
(16)
2.2. Переменные Андуайе-Депри. Введем малую динамическую асимметрию ротора
Ar - Br
(17)
где О ^((2 + О2у + О:. Подставим (18)—(20) в уравнения (15); учитывая малую асимметрию (17), разложим правую часть дифференциальных уравнений в ряд по степеням е и, отбрасы-
2
вая слагаемые порядка в и выше, получим следующие уравнения:
/ = X ((Вр - Ар) ес8 2/ - (Ар + Вр + 2АГ)) +
и в случае, когда отсутствует внешний момент, динамические уравнения (15) можно существенно упростить путем перехода к переменным Ану-айе-Депри [22]. Проекции кинетического момента системы в этих переменных на оси Охрур1р (рис. 2) имеют вид
2 (Ap + Ar )(Bp + Ar)
L -5 Cr
Cp + C,
+ e F,
. (G2 - lL)(Ap - Bp)sin l cos l
L =------+ &Fj,
(Ap + a, )(Ar + Bp)
(21)
(22)
(18) где
r
F¡ =-
LAr [(Ap + Ar) cos 5 cos l - (Ar + Bp) sin 5 sin l] (Ap + Ar )2(Ar + Bp)2
(23)
Fl =
Ar(G2 - L2)
2(Ap + Ar )2(Ar + Bp )2
x [2Ap cos 8(Ar sin(8 + 2l) + Bp sin 8 cos 2l) + (24)
2 2
+ 2ArBp sin 8cos(8 + 2l) + Ap cos 8sin2l +
+ A2 sin 2(8 +1) - B2p sin2 8 sin 21J.
2.3. Уравнение относительного движения ротора. Уравнения движения асимметричного гиростата (21), (22) содержат угол поворота ротора относительно платформы — 5. Дополним систему (21), (22) уравнением для угла 8, используя теорему об изменении кинетического момента, записанную для платформы относительно полюса O:
dG p dt
®p X G p = -g s + Mc
(25)
Gp - Jp ■ ®p.
(26)
Скалярно умножив уравнение (25) на вектор a, с учетом (26), получим:
Gpz =
1 1
V Ap
B
GpxGpy •
(27)
p
Для перехода к переменным Андуайе—Депри в уравнении (27) выразим проекции кинетического момента платформы через ее угловые скорости и моменты инерции:
Cpáz + Bp<ax®y - Ap®x®y = -g
(28)
где g 8 — вектор малого внутреннего момента 8в = ¿ъа Мс — вектор момента реакции связи, возникающий при рассмотрении движения платформы как отдельного тела и направленный
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.