ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА Том 74. Вып. 5, 2010
УДК 531.36
© 2010 г. В. С. Асланов, А. В. Дорошин ХАОТИЧЕСКАЯ ДИНАМИКА НЕУРАВНОВЕШЕННОГО ГИРОСТАТА
Рассматривается свободное пространственное движение неуравновешенного гиростата относительно центра масс. В канонических переменных Андуайе—Депри записан возмущенный гамильтониан для случая малой динамической асимметрии ротора. Проведен анализ структуры фазового пространства невозмущенной системы, выделено шесть видов возможных фазовых портретов и аналитически найдены уравнения фазовых траекторий. Для всех видов фазовых портретов получены явные аналитические зависимости переменных Андуайе—Депри от времени, соответствующие гетероклиническим орбитам. С использованием полученных аналитических решений для гетероклинических сепаратрисных орбит записана функция Мельникова возмущенной системы и численно показано наличие простых нулей, что свидетельствует о пересечении устойчивых и неустойчивых многообразий гиперболических точек и хаотизации движения. С помощью сечений Пуанкаре приведены иллюстрации режимов хаотического движения неуравновешенного гиростата.
В последнее время большое внимание уделяется вопросам сложной динамики и хаотизации режимов движения гиростата, связанных с переменностью состава (массы), а также с наличием внешних и внутренних возмущений различной природы [1—9]. Следует указать режимы движения, возникающие при изменении инерционно-массовых параметров во времени [1—3], действии гравитационных сил [4] и возмущений, связанных с внутренними факторами, такими как наличие внутри гиростата полостей с жидкостью [5, 6] и малой асимметрии тела-ротора [7—9]. В основном для аналитического обнаружения возникновения хаоса в известных работах используется формализм Мельникова—Виггинса, основанный на поиске простых нулей функции Мельникова, свидетельствующих о наличии пересечений устойчивых и неустойчивых многообразий гиперболических точек и расщеплении сепаратрис [10—13]. В ряде работ для изучения хаотического поведения используются методы Марсдена—Холмса [14], а также показывается принципиальная неинтегрируемость уравнений движения [15] на основе метода В.В. Козлова [16] и доказывается отсутствие дополнительного аналитического первого интеграла. Описание движения гиростатов, как правило, проводится на основе компонент кинетического момента, а также с применением канонических переменных Андуайе—Депри [17]. Важно отметить, что в цитируемых работах аналитические зависимости для невозмущенных сепаратрис в пространстве переменных Андуайе—Депри, необходимые для записи функции Мельникова, строятся на основе известных аналитических зависимостей для гомоклинических решений в трехмерном пространстве компонент кинетического момента свободного твердого тела и уравновешенного гиростата. Переход к углам и импульсам Андуайе—Депри обычно осуществляется с помощью соотношений кинематического вида без интегрирования канонических уравнений в переменных Андуайе—Депри.
В отличие от существующих работ в настоящей статье аналитические решения для гетеро-клинических орбит уравновешенного гиростата находятся путем непосредственного интегрирования канонических уравнений в переменных Андуайе—Депри с учетом буфуркационных изменений структуры фазового пространства.
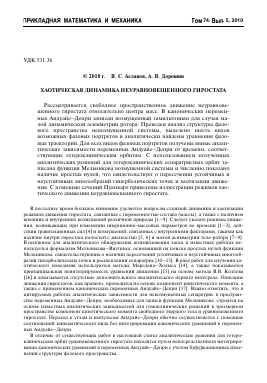
Фиг. 1
1. Постановка задачи. Рассмотрим свободное пространственное движение относительно центра масс O неуравновешенного гиростата, образованного двумя телами с трехосными эллипсоидами инерции. Введем следующие системы координат (фиг. 1): OXYZ — инерциальная система координат, OX2y2Z2 — связанная главная система координат тела-носителя, Oxyzi — связанная главная система координат соосного тела-ротора. Оси Ozi и Oz2 связанных систем совпадают с общей осью вращения соосных тел. Векторы угловых скоростей тел представлены в проекциях на оси связанных координат Ox1y1z1 и Ox2y2z2: Ю1 = (p' ,q' ,r ')T, w2 = (p,q, r)T, причем проекции угловой скорости ротора выражаются через угловую скорость тела-носителя следующим образом:
p' = pcos5 + qsin5, q' = qcos5- psin5, r' = r + ст (ст = 5) (1.1)
где S — угол относительного закручивания тела ротора (угол между осями Ox2 и Oxx). Выражения для кинетической энергии и кинетического момента в проекциях на оси Ox2y2z2 имеют вид
T = A1 (pcosS + qsinS)2 + B1 (qcosS - psinS)2 + C1 (r + c)2 + A2p2 + B2q2 + C2r2) (1.2)
K = [p(A1cos28 + B1s¡n28 + A2) + M - 8cos8]i+ (L3)
+1 p(A1 - B1)sin8cos8 + q(A1sin28 + B1cos28 + B2) I j + [(C1 + C2)r + C1o]k
где A, B¡, C¡ — главные моменты инерции тел (i = 1, 2). Пусть для определенности A1 > B1 и A2 > B2. Введем безразмерный параметр
6 = (А - В^/А > 0 (1.4)
характеризующий динамическую асимметрию тела-ротора. Отметим, что описание движения, когда А < В2 и (или) А\ < 2 может быть без потери общности сведено к заявленному случаю путем переобозначений осей связанных систем координат с пересчетом начальных условий.
Перейдем к описанию динамики системы в переменных Андуайе—Депри [17]. В этих переменных положение основного тела-носителя определяется тремя углами: ф3, ф2 и I, характеризующими повороты относительно оси 02, направления кинетического момента системы и оси соответственно. Выражения для обобщенных импульсов Андуайе—Депри, согласно определению, запишутся следующим образом:
Ь = дТ = К • к, 12 = — = К • 8 = К, /3 = — = К • кД = дТ = С(г + о)
51 дф2 дф3 55
Отметим, что обобщенные импульсы Ь, 13 являются проекциями кинетического момента системы на оси 0z2 и 0Z, а импульс ^ равен величине вектора кинетического момента, поэтому Ь < /2. Как известно, компоненты кинетического момента могут быть выражены в переменных Андуайе-Депри следующим образом [17]:
Kx
= VI22 - Lsinl, K = VI22 - Leos/, K = L (1.5)
Сопоставляя компоненты кинетического момента системы, используя выражения (1.5) и (1.3), можно выразить проекции угловых скоростей через переменные Андуайе-Депри
¡I2 _ l
p = 2-[Qsin/ - (Лг _ B^sin5eos5eos/]
¡I 2 _ L
q 2-Qeos/ _ (Л1 _ Bj)sin5eos5sin/] (1.6)
L_A A L_A r =-, ст =---
C2 C1 C2
где
S = (Л1 + B2)(B1 + A2)sin2 5 + (Л1 + Л2)(Bl + B2)eos2 5
2 2 2 2 Q = A1sin 5 + B1eos 5 + B2, R = A1eos 5 + B1sin 5 + Л2
При учете соотношения (1.4) экваториальные угловые скорости (1.6) можно переписать в виде, содержащем безразмерный параметр б:
1—2 _ jL2
p - 2— [(Л1 + B2)sin/ _ EЛ1eos5sin(/ + 5)]
I 12 _ j2
q = У—2-[(Л1 + Л2)eos/ _ g^sin5sin(/ + 5)]
S
где
S = G -гЛ1Б(Ъ), G = (Л1 + B2)(Л1 + Л2), E(8) = Л1 + Л2eos28 + B2sin28
Подставляя выражения (1.6) в соотношение (1.2), запишем гамильтониан системы в переменных Андуайе—Депри. Если безразмерный параметр б мал, можно разделить
выражение для гамильтониана на невозмущенную часть Н0 и возмущенную еН^ пропорциональную первому порядку б:
H = T £ H0(l,L,12,A) + eH1(l,8,L,I2)
J2 _ T2
H0 = ^ (l) +
A + (L -A)2
C C2
Hi =-
2 (I22 - L2) ^ G '
x ( (5)£(l) - sin2(l + 5) —-[(A1 + B2)sinlsin5 - (A1 + A2)coslcos5] I 2G
5(l) =
2 2 sin l + cos l
Ai + A2 Ai + B2
(1.7)
(1.8)
(1.9) (1.10)
Каноническая система уравнений Гамильтона в переменных Андуайе—Депри принимает вид
. дБ, дН1 . дН0 дН1
( =-0 + Е-1, Р1 =--0 - Е-1
др1 др1 д(1 д(
где = (/,ф2,фз,^, Р1 = (Ь, 1Ъ /3, А) — канонические координаты и импульсы. Учитывая выражения (1.8) и (1.9), уравнения (1.11) запишем в виде
/ = дБ + £дН1, (р2 = дНо + ЕдН1, Фз = о, 5 = дНо
дЬ дЬ д12 д!2 дЛ
(1.11)
L = -дн -ЪШ1, I2 = о, i, = 0, A = sH
dl dl 2 3 55
2. Структура фазового пространства невозмущенной системы. В невозмущенном случае (е = 0), когда ротор обладает осевой динамической симметрией (A1 = B1), гамильтониан (1.8) с точностью до постоянной (А = const) может быть переписан в виде
(1.12)
H
(l,L) = g(L) + a2(l2 - L2)cos2l = h = const
где
LA
g ID = a1(122 - l2 )+-
a1 =■
2A1 + A2 + B2
a2 =■
A2 - B2
(2.1)
(2.2)
4(A1 + A2XA1 + B2) 4(A1 + A2M + B2)
Гамильтониану (2.1) отвечает невозмущенная система уравнений
l = dH° = L - A - 2L(a1 + a2cos2l), L = = 2a2(l22 - L2)sin2l dL C C y 1 2 ' dl Л 2 I
(2.3)
Фазовое пространство системы (2.3) представляет собой развертку следующего цилиндра (кольца):
U = j((,L) е R2: l е [0,2п], Щ < I2, L е [-1,1]j
(2.4)
2 Прикладная математика и механика, № 5
Фиг. 2
В силу уравнений (2.3) возможны следующие группы особых точек (/*, Ь*), соответствующих положениям равновесия (/(/*, Ь*) = Ь (/*, Ь*) = 0):
1) /* = пп, Ь* - 2[ + = В\ А (2.5)
С2 \С2 ) А + в2 - с2
,-1
2) /* =П + пп, Ь* = - 2[а1 - а2]'] = А++ А с А (2.6)
2 С2 VС2 ) Ах + А2 - С2
3) Ь* = /2, cos2/* = 1 0 (2.7)
а2 ^ 2/2С2 У
4) Ь* = -/2, cos2/* = 1Г1^- а1 1 (2.8)
а2 ^ 2/2С2 У
Отметим, что, вообще говоря, в силу второго уравнения (2.3) на фазовом портрете (ФП) существуют особые точки с координатой /^ = пк/2, которые, однако, приходится разделять на две разные группы: когда k — четное число (к = 2п, /* = пп), имеют место точки (2.5), а когда k — нечетное число (к = 1 + 2п, /* = п(1 + 2п)/2 = п/2 + пп), то — точки (2.6). Видно, что соответствующие значения Ь^ — разные для точек (2.5) и (2.6).
Анализ этих особых точек показывает, что при разных сочетаниях моментов инерции тел возможны различные типы ФП, структура которых характеризуется бифуркационной диаграммой, показанной на фиг. 2 (Л = А1 - С2). Пусть для определенности D < 0 и А > 0. ФП системы может иметь один из шести качественных видов (фиг. 3).
Таблица ^
Зона или граница Критическая величина А* Ограничения д = а//2 Качественный вид фазового портрета (фиг. 3)
Зона 1 а12 0 < д < в 1
(а > в > 0) в < д < а 2
Граница 1 (а > 0, в = 0) а12 0 < д < а 2
Зона 2 У /2 у < д < у 2
(а > 0, в < 0) 0 < д < у 3
Граница 2 (а = 0, в < 0) -в/2 0 < д < -в 4
Зона 3 (0 > а > в) -вЛ -а < д < -в 0 < д < -а 4 5
В табл. 1 показано соответствие качественных видов и ограничений величины импульса А, учитывающее различие моментов инерции в зависимости от зоны; введены следующие вспомогательные величины:
а = 1 , Р = 1 "Т^, У = ^{а1,в) У= 8иР(М,в) (2.9)
А1 + А2 А1 + В2
Отметим, что если D > 0, то будем иметь только зону 1, если А < 0, то будем иметь симметрично отраженную относительно координатной оси 01 ф
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.