КОСМИЧЕСКИЕ ИССЛЕДОВАНИЯ, 2012, том 50, № 2, с. 176-182
УДК 531.381:629.78
ИССЛЕДОВАНИЕ БЫСТРОДЕЙСТВИЯ АЛГОРИТМА АКТИВНОГО МАГНИТНОГО ДЕМПФИРОВАНИЯ
© 2012 г. М. Ю. Овчинников, В. И. Пеньков, Д. С. Ролдугин, С. О. Карпенко
Институт прикладной математики им. М.В. Келдыша РАН, г. Москва
ovchinni@keldysh.ru Поступила в редакцию 09.09.2010 г.
Рассматривается быстрое вращение спутника, оснащенного активной магнитной системой ориентации с алгоритмом "-Bdot", предназначенным для демпфирования начальной угловой скорости. Аналитически исследуется быстродействие алгоритма в зависимости от наклонения орбиты.
ВВЕДЕНИЕ
Магнитные системы ориентации (МСО) широко применяются в контуре управления угловым движением искусственных спутников Земли в тех случаях, когда предпочтительно использовать недорогую элементную базу и простые, реализуемые на бортовых компьютерах с ограниченными ресурсами алгоритмы. В качестве основной МСО используется, как правило, на небольших спутниках. С одной стороны, к их системе ориентации обычно не предъявляют высоких требований по точности и быстродействию, с другой — МСО могут явиться единственно возможным вариантом для установки на борту спутника в силу имеющихся ограничений по его массе и энерговооруженности. МСО могут использоваться как самостоятельно, так и совместно с системами ориентации другого типа. Это, прежде всего, пассивные системы: например, гравитационные и аэродинамические, а также системы с использованием маховиков.
В настоящей статье рассматривается движение спутника, оснащенного МСО, реализующей известный алгоритм "-Bdot" [1] (принятое и ставшее уже традиционным в англоязычной литературе обозначение алгоритма отражает зависимость дипольного момента исполнительных магнитных элементов от производной вектора B геомагнитной индукции). В большинстве работ, где рассматривается движение спутника с МСО, которая реализует этот алгоритм, основное внимание уделяется либо проблеме использования алгоритма для спутников с заданными параметрами [2], либо численному моделированию динамики [3]. Схожая по сути задача, но с иной физической интерпретацией исследовалась ранее В.В. Белецким [4], [5], где рассматривалось воздействие вихревых токов на спутник. Воздействие аппроксимировалось моментом, по форме, как позже оказалось, совпадающим с создаваемым МСО при использовании алгоритма "-Bdot"
и упрощенного для случая быстрых вращений. Анализируя динамику спутника, автор пришел к выводу об уменьшении модуля вектора кинетического момента и стремлении его к определенному фиксированному в инерциальном пространстве направлению. Для движения по экваториальной орбите это направление было найдено. Выводы, однако, были получены на основе анализа уравнений, которые в случае движения в рамках принятой им модели геомагнитного поля не удалось проинтегрировать. В работах [6], [7] проведено исследование зависимости кинетического момента от времени для спутника под воздействием вихревых токов. Опираясь на уравнения движения, полученные в [4], авторы получили выражения, ограничивающие значения модуля кинетического момента в течение всего времени движения.
1. ПОСТАНОВКА ЗАДАЧИ.
УРАВНЕНИЯ ДВИЖЕНИЯ
Опишем используемую в работе модель геомагнитного поля. Обычно вектор напряженности геомагнитного поля вычисляется при помощи разложения потенциала поля в ряд Гаусса [4]
B = ц0VV, V = -R¿(R)'
i=1
m
x (t)cosmko + НП (t)sin mko) (cos$o),
n=0
где X 0 — долгота точки, в которой определяется вектор напряженности, &0 = 90° — 0o, 90 — ее широта, r—расстояние от центра Земли, R — средний радиус Земли. gm и Н^ — коэффициенты Шмидта, определяемые из таблицы [4], ц 0 — магнитная по-
m
стоянная. Pn — квазинормализованные по Шмидту присоединенные функции Лежандра.
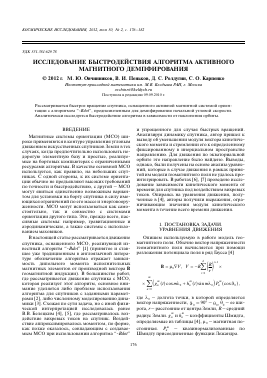
Использование этой модели в аналитических исследованиях затруднительно, поэтому вводятся упрощенные модели. Модель наклонного диполя, получающаяся из гауссовой модели при учете первых трех слагаемых, описывает поле диполя, наклоненного под углом 168°26' к оси вращения Земли. Хотя эта модель допускает достаточно простую запись, с ее использованием не удается провести аналитическое исследование получающихся уравнений. Широко используется дальнейшее упрощение этой модели — модель прямого диполя, согласно которой геомагнитное поле аппроксимируется полем диполя, лежащего на оси вращения Земли в ее центре и антипараллельного ей. При движении спутника по орбите вектор индукции движется практически равномерно по почти круговому конусу в системе координат, начало которой лежит в центре масс спутника, а оси параллельны осям инерциальной системы ОаУ1У2У3, где Оа — центр масс Земли, ось ОаУ3 направлена по оси вращения Земли, ОаУ1 лежит в плоскости земного экватора и направлена в восходящий узел орбиты спутника, ОаУ2 дополняет систему до правой. Но и при использовании этой модели еще не удается получить решение уравнений движения спутника хотя бы в квадратурах. Поэтому логично провести дальнейшее упрощение, моделируя геомагнитное поле вектором, равномерно движущимся по круговому конусу. Если перенести вектор индукции в центр масс Земли, то конус касается оси ОаУ3 системы ОаУ1У2У3, его ось лежит в плоскости ОаУ2У3 (рис. 1). Угол полураствора конуса вычисляется [8] из соотношения
© =
ЗБ1П 21
211 - 38Ш21 + л11 + 3 б1П2
(1.1)
Вектор геомагнитной индукции в рамках этой модели движется по конусу равномерно с удвоенной орбитальной скоростью, х = 2ю0? + хо = = 2и + х0, где ю0 — орбитальная скорость, и — аргумент широты. Без ограничения общности можно
считать, что х 0 = 0.
Описанную модель геомагнитного поля, иногда называемую осредненной, будем использовать в настоящей работе. Хотя эта модель не позволяет учесть неравномерность вращения местного вектора геомагнитной индукции при движении спутника по орбите (как это учитывает, например, модель прямого диполя) и его суточное изменение (как учитывает модель наклонного диполя), тем не менее, она позволяет достаточно достоверно описать основные свойства магнитного поля, влияющие на динамику спутника. Детальное сравнение моделей выполнено в [4]. Заметим
Рис. 1. Осредненная модель геомагнитного поля.
только, что отклонение вектора индукции в модели прямого диполя от вектора индукции в осред-ненной модели не превышает 1°11'.
Введем недостающие для описания движения спутника правые ортогональные системы координат.
— инерциальная система, полученная из системы ОаУ1У2У3 поворотом на угол © вокруг оси ОаУ1.
ОЬ1Ь2Ь3 — система, связанная с кинетическим моментом спутника. О — центр масс спутника, ось ОЬ3 направлена по вектору кинетического момента спутника, ось ОЬ 2 — перпендикулярно ОЬ 3 и лежит в плоскости, параллельной OaZ1Z> и проходящей через О, ось ОЬ1 дополняет систему до правой.
Ох1х2х3 — связанная система, ее оси совпадают с главными центральными осями инерции спутника.
Ориентацию систем друг относительно друга будем определять двумя матрицами направляющих косинусов О, А, записанными в виде таблиц соответственно
А Ь2 Ьз
21 #11 #12 #13
22 #21 #22 #23
23 #31 #32 #33
Ь ап а12 а1з Ь2 а21 а22 а23 Ь3 аз1 аз2 азз
Введем нижние индексы Z, Ь, х для обозначения векторов и их компонент, заданных, соответственно, в системах ОЬ1Ь2Ь3 и Ох1х2х3.
Для описания движения спутника будем использовать уравнения в переменных Белецкого— Черноусько Ь, р, а, ф, у, 9 [9], где Ь — модуль вектора кинетического момента, углы р, а определяют его ориентацию относительно инерциальной системы (рис. 2). Ориентация осей си-
стемы Ох1х2х3 относительно системы ОЬ1Ь2Ь3 за-
дается углами Эйлера ф, у, 9. Матрицы Q и A направляющих косинусов имеют соответственно вид
Л
Q =
cos р cos а - sin а sin р cos а cos р sin а cos а sin р sin а - sin р 0 cos р
У
(1.2)
Л
A =
cos ф cos у- cos 0 sin ф sin у - sin ф cos у- cos 0 cos ф sin у sin 0 sin у cos ф sin у + cos 0 sin ф cos у - sin ф sin у + cos 0 cos ф cos у - sin 0 cos у
sin 0 sin ф
sin 0 cos ф
cos 0
(1.3)
Рассмотрим осесимметричный спутник и введем его тензор инерции Jx = diag(A, A, C). Считаем, что его центр масс движется по круговой орбите. Движение такого спутника относительно центра масс описывается [10] системой уравнений
dL = M3L, dP = IMlL, ^ = M2L, dt dt L dt L sin p
d6 1
v = I (M2l cos y - Mil sin y), dt L
^ = L cos 6 ( -1
1
x
dt \C A L sin 6
x (M1L cos y + M2L sin y),
= L -1 mil x dt A L
cos y ctg 6 -1M2L (ctg p + sin y ctg 6), L
(1.4)
водную в инерциальной системе OaZ1Z2Z3 по следующей формуле:
dB. dt
= A
rdB Z „
—Z - wx x B. dt
(2.1)
где М1Ь, М2Ь, М3Ь — компоненты вектора суммарного внешнего момента.
2. ИССЛЕДОВАНИЕ ДИНАМИКИ СПУТНИКА
Исследуем быстрые вращения спутника под действием магнитного момента в поле осреднен-ной модели, описываемые уравнениями (1.4).
2.1. Эволюция вектора кинетического момента. Механический момент описывается выражением М = т х В, где m — дипольный магнитный момент спутника. Считаем, что на спутнике установлена система магнитных катушек, позволяющая реализовать любой наперед заданный ди-польный момент. Управление формируется алгоритмом "-Bdot", согласно которому дипольный магнитный момент спутника задается [1] выражением тх = , где к — постоянный коэффициент.
Вычислим производную вектора геомагнитной индукции в системе Ох1х2х3 через его произ-
Рассмотрим теперь быстрые вращения спутника, при которых первым слагаемым, описывающим вращение вектора B относительно инерциально-го пространства, в правой части (2.1) можно пренебречь, то есть считаем, что угловая скорость спутника намного больше его орбитальной скорости (Ь/А > ю0, Ь/С > ю0). Такой режим может иметь место на начальном этапе движения спутника, когда он имеет большую угловую скорость, полученную при отделении от носителя. В этом случае использование магнитной системы позволяет демпфировать начальную угловую скорость, после чего управление движением спутника может быть организовано с использованием другого алгоритма или даже другой системы ориентации. Итак, будем рассматривать движение спутника под действием момента
Мх = к (ю, х Вх) х Вх. (2.2)
Выразим угловую скорость спутник
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.