Бондарь А.И., аспирант Новосибирского государственного архитектурно-строительного университета
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ КАЧЕНИЯ ОБОЛОЧКИ ТИПА ДВОЙНОГО СФЕРИЧЕСКОГО СЕГМЕНТА ПО МОДЕЛЯМ ПЕРВОГО ПРИБЛИЖЕНИЯ
В работе исследуются два варианта построения моделей качения оболочки типа двойного сферического сегмента по горизонтальной плоскости: на основе динамических уравнений Эйлера и на основе уравнений Лагранжа второго рода. Определяются условия устойчивости качения оболочки и выводятся уравнения малых колебаний оболочки при ее устойчивом качении.
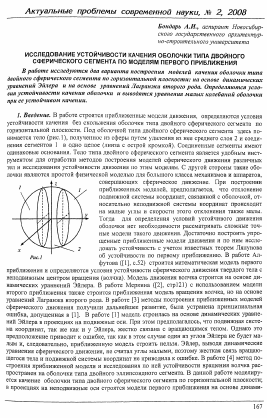
1. Введение. В работе строятся приближенные модели движения, определяются условия устойчивости качения без скольжения оболочки типа двойного сферического сегмента по горизонтальной плоскости. Под оболочкой типа двойного сферического сегмента здесь понимается тело (рис.1), полученное из сферы путем удаления из нее среднего слоя 2 и соединения сегментов 1 в одно целое (линза с острой кромкой). Соединенные сегменты имеют одинаковые основания. Тело типа двойного сферического сегмента является удобным инструментом для отработки методов построения моделей сферического движения различных тел и исследования устойчивости движения по этим моделям. С другой стороны такие оболочки являются простой физической моделью для большого класса механизмов и аппаратов,
совершающих сферическое движение. При построении приближенных моделей, предполагается, что отклонение подвижной системы координат, связанной с оболочкой, относительно неподвижной системы координат происходит на малые углы и скорости этого отклонения также малы. Тогда для определения условий устойчивого движения оболочки нет необходимости рассматривать сложные точные модели такого движения. Достаточно построить упрощенные приближенные модели движения и по ним исследовать устойчивость с учетом известных теорем Ляпунова об устойчивости по первому приближению. В работе Ал-футова ([1], с.52) строится математическая модель первого приближения и определяются условия устойчивости сферического движения твердого тела с неподвижным центром вращения (волчка). Модель движения волчка строится на основе динамических уравнений Эйлера. В работе Меркина ([2], стр 121) с использованием модели второго приближения также строится приближенная модель вращения волчка, но на основе уравнений Лагранжа второго рода. В работе [3] методы построения приближенных моделей сферического движения получили дальнейшее развитие, была устранена принципиальная ошибка, допущенная в [1]. В работе [1] модель строилась на основе динамических уравнений Эйлера в проекциях на подвижные оси. При этом предполагалось, что подвижная система координат, так же как и у Эйлера, жестко связана с вращающимся телом. Однако это предположение приводит к ошибке, так как в этом случае один из углов Эйлера не будет малым и, следовательно, приближенную модель строить нельзя. Эйлер, выводя динамические уравнения сферического движения, не считал углы малыми, поэтому жесткая связь вращающегося тела и подвижной системы координат не приводила к ошибке. В работе [4] метод построения приближенной модели и исследования по ней устойчивости вращения волчка распространен на оболочки типа двойного эллипсоидного сегмента. В данной работе моделируется качение оболочки типа двойного сферического сегмента по горизонтальной плоскости; в проекциях на неподвижные оси строятся модели первого приближения на основе динами-
ческих уравнений Эйлера и на основе уравнений Лагранжа второго рода. В работе показано, что модели первого приближения обладают рядом полезных свойств, что упрощает решение соответствующих задач. В частности, преобразование координат в моделях первого приближения сферического движения, в отличие от точных моделей, обладают свойством инвариантности по отношению к порядку изменения углов Эйлера. При построении моделей сферического движения с использованием динамических уравнений Эйлера можно ограничиться моделью первого приближения. Для моделей, построенных на основе уравнений Лагранжа второго рода необходимо использовать малые величины второго порядка. И хотя преобразование координат в моделях второго приближения не обладает свойством инвариантности относительно порядка изменения углов Эйлера и функция Лагранжа зависит от порядка изменения этих углов, однако модель качения оболочки, построенная с использованием уравнений Лагранжа второго рода (уравнений Рауса), инвариантна относительно порядка изменения углов Эйлера. Классические уравнения Эйлера выводятся в проекциях на подвижные оси, так как в проекциях на неподвижные оси уравнения имеют сложный вид. Если строить модель первого и второго приближения, то динамические уравнения Эйлера будут одинакового порядка сложности, что в проекциях на подвижные оси, что в проекциях на неподвижные оси.
При построении моделей первого и второго приближения в данной работе использовался метод векторно-матричиого задания сферического движения, основа которого изложена в работе Маркеева ([5],с. 304). В данной работе этот метод используется в модифицированном виде: оптимальный выбор углов Эйлера и замена промежуточных положений подвижной системы координат начальными положениями значительно упрощает использование этого метода.
Частный случай движения оболочки типа двойного сферического сегмента ~ движение тонкого однородного диска рассмотрен в работе Неймарка ([6],с. 307). Неймарк исследовал устойчивость качения и вращения диска по горизонтальной шероховатой плоскости, построив на основе уравнений Лагранжа второго рода полную модель этого движения. Однако в силу сложности полной модели, в [6] получены условия устойчивого качения и вращения диска только в частных случаях при некоторых постоянных значениях одного из углов Эйлера и без учета уравнений неголономной связи. В данной работе получены общие условия устойчивости качения диска, как частный случай условий устойчивого качения соответствующей оболочки.
2. Постановка задачи. Пусть оболочка типа двойного сферического сегмента катится без скольжения по горизонтальной плоскости, соприкасаясь с плоскостью одной опорной точкой. Требуется построить математическую модель этого движения, определить условия устойчивого качения оболочки и получить уравнения малых колебаний оболочки при ее устойчивом движении. На примере качения оболочки мы строим модель и исследуем устойчивость сферического движения тела с мгновенным центром вращения.
Для получения уравнений движения оболочки вводятся три системы координат (рис 2): 1) неподвижная система координат О'х'у'г'\ 2) подвижная система координат 0%г]д, которая движется поступательно вместе с опорной точкой оболочки, (оси системы 0^т]д параллельны соответствующим осям системы О'х'у'г'У, 3) подвижная система координатор, (оси системы Охуг параллельны главным осям инерции оболочки, однако система Охуг не связана с оболочкой, жестко с системой Охуг связана только ось оболочки). В качестве обобщенных координат, определяющих положение оболочки в неподвижной системе О'х'у'г' 9 возьмем координаты х\у' опорной точки О и углы <р,0,у/. Эти углы будем называть углами Эйлера.(В расширенном определении углами Эйлера называют любые три угла однозначно определяющие положение подвижной системы Охуг относительно неподвиж-
ной ). (Углы 6,1// определяют ориентацию системы Oxyz относительно системы Ot,r¡q , а угол (р определяет положение оболочки в системе O'x'y'z', на рис.2 угол <р не указан). При невозмущенном движении системы координат Oxyz и O^rjg совпадают, при этом оболочка катится по опорной плоскости О'х'у' вдоль оси Оу со скоростью V = co0R, где со0 = const - угловая скорость качения оболочки, R радиус оболочки. Вектор скорости Vc центра масс оболочки совпадает с направлением оси Оу, вектор угловой скорости ¿д0 направлен вдоль оси Ох . Центр масс оболочки движется равномерно и прямолинейно. Также движется и опорная точка О. (Оболочка вращается вокруг оси Ох).
Мы будем строить модели первого и второго приближения, полагая, что углы (р,ц/,6
являются малыми величинами. Угловые скорости поворотов также величины малые.
В моделях первого приближения будем считать, что для малых величин a,j3 имеют место соотношения sin a = a, cos#=l, аф- 0.
При изменении угла q> в процессе качения оболочки происходит перекатывание ее по опорной плоскости вдоль проекции оси Оу на опорную плоскость (опорная точка перемещается по опорной плоскости).
3. Преобразование координат в модели первого приближения. Предположим, что система Oxyz повернулась относительно системы 0%r¡£ на малые углы в,у/,(р. Пусть / к -орты координатных осей Ox,Oy,Oz, T,m,ñ - орты координатных осей 0rj,0¿¡ • Получим выражения векторов /' ,j ,к через вектора и углы Эйлера. Переход системы Oxyz к системе 0%r¡£ можно осуществить при помощи трех последовательных поворотов: на угол в вокруг оси Or¡, на угол у/ вокруг оси Oz и на угол <р вокруг оси Ох. Все повороты производятся против часовой стрелки при рассмотрении их с конца соответствующей оси. При первом повороте на угол в вокруг оси Or¡ мы переводим систему Oxyz в промежуточное положение Okr¡z (рис.2).
С
Z
Рис. 2
Соответствующий переход задается матрицей А], которая с учетом малости величины в будет иметь вид
( СОБ 9 0 -ып^ ( 1 0 н9Л
4 = 0 1 0 - 0 1 0
^тв 0 СОБО у 0 1,
Первоначальный поворот системы Охуг на угол у/ вокруг оси ОС, задается матрицей Л2
' СОБ!// (1 у/ 0'
а2 = - вш у/ соъу/ 0 = = ~¥ 1 0
° 0 ч 1° 0 \)
первоначальный поворот системы Охуг на угол <р вокруг оси 0% задается матрицей А,
Г1 о 0 (\ 0
4 = 0 СО Б(р бш (р = = 0 1 <Р
К0 — СО $(р ^ ,0 -<р и
Нетрудно проверить, определив проекции векторов / ,1 ,к на координатные оси системы 0£г}£, что поворот системы Охуг из начального положения в конечное положение в случае изменения двух углов в порядке в,у/ задается матрицей А , являющейся произведением двух матриц А = А2Аг
( 1 ¥ (\ 0 ( 1 ¥ -0\
А — А-) А| — -у/ 1 0 0 1 0 = -у/ 1 0
1° 0 Ъ [о 0 1, и 0 1,
Поскольку операция перемножения матриц не обладает свойством комму тативности, то в общем случае конечные повороты системы Охуг некоммутатив
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.