ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 1, 2014
УДК 621.83.4
© 2014 г. Гончаров А.А., Гончаров Ан.А.
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЭЛЕМЕНТОВ
НА САМОТОРМОЖЕНИЕ КЛИНОВЫХ МЕХАНИЗМОВ СВОБОДНОГО ХОДА
При использовании статической неконсервативной гранично-элементной модели исследуется фаза активного нагружения клиновых механизмов свободного хода и изучается влияние геометрии элементов на процесс самоторможения. На основе полученных решений контактных задач построены зависимости, связывающие геометрические параметры со значениями минимальных коэффициентов трения скольжения, при реализации которых обеспечивается самоторможение механизма.
Высокое быстродействие, нагрузочная способность и угловая жесткость выдвигают клиновые механизмы свободного хода (МСХ) с дополнительной кинематической связью ведущего и ведомого элементов [1] в разряд наиболее перспективных для использования в быстроходных силовых приводах. По принципу действия они относятся к категории комбинированных механизмов, схемно-конструктивное решение которых обеспечивает теоретическую возможность передачи нагрузки двумя параллельными силовыми потоками — силами трения через контакт клина с обоймами и через элементы кинематической связи. Экспериментально установлено, что при реализации кинематической связи в виде зубчатого зацепления или муфты Ольдгейма основная часть нагрузки передается фрикционным силовым потоком. В этой связи работоспособность МСХ, как и механизмов чисто фрикционного типа, зависит от геометрических параметров элементов. Их выбор при заданной величине коэффициента трения должен обеспечивать включение (заклинивание) механизмов под действием функциональной нагрузки и выключение (расклинивание) после ее снятия. Поэтому геометрический расчет МСХ является наиболее важным этапом общей методики проектного расчета. Задачу оптимального проектирования МСХ следует рассматривать прежде всего как задачу выбора геометрических параметров элементов триботехнической системы с целью обеспечения заданных эксплуатационных свойств.
Работоспособность клиновых МСХ оценивается при помощи упрощенных статических моделей, позволяющих получить соотношения, связывающие геометрию контактных поверхностей элементов и реализуемые на них коэффициенты трения в состоянии предельного равновесия конструкции. В частности, удовлетворительно согласующееся с практикой условие включения МСХ получено в работе [1]. Оно имеет вид
Г> е/(г2 + гг),
где е — эксцентриситет МСХ; г2, г3 — радиусы контактных поверхностей клина (ведущей и ведомой обойм); / — реализуемый в областях контакта коэффициент трения скольжения.
Необходимо отметить, что определяющее конфигурацию звеньев МСХ выражение нельзя использовать для нахождения абсолютных размеров механизма, выбор кото-
У
2
3
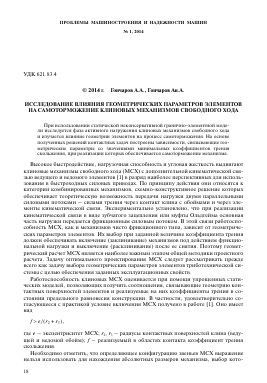
Рис. 1
рых при проектном расчете связан с условиями прочности и жесткости конструкции, а также величиной реализуемого момента трения. Независимо от истории нагружения условие самозаклинивания механизма отождествляется с условием его самоторможения, что, как показали результаты моделирования [2], не является верным.
При оценке явления заклинивания МСХ следует различать два режима эксплуатации: режим стопорного механизма (останова) и механизма пульсирующего действия (выпрямителя механических колебаний). Они соответствуют условиям простого и сложного нагружения. В первом случае происходит остановка ведущего звена механизма, нагруженного моментом М0, во втором — вращательное движение передается к ведомому звену, нагруженному моментом полезной нагрузки Мс. Стоповый режим реализуется при жестком закреплении ведомой обоймы. Данный случай эквивалентен поэтапному возрастанию касательной и нормальной нагрузок, отношение которых сохраняется постоянным. По этой причине процессы самозаклинивания и самоторможения МСХ являются идентичными, т.е. включение механизма в этом режиме не зависит от уровня прилагаемого к ведущему звену момента М0.
В условиях сложного нагружения (режим выпрямителя) действие переменного момента на ведущем звене, даже при постоянной нагрузке на ведомом звене, определяет множество состояний МСХ. Области контакта клина с обоймами подвергаются действию однонаправленной касательной нагрузки, что приводит к изменению соотношения нормальных и касательных усилий в этих областях и, следовательно, условий фрикционного сцепления тел. По этой причине процессы заклинивания и самоторможения МСХ тождественными не являются. Необходимые и достаточные условия заклинивания МСХ в режиме выпрямителя (наряду с известными геометрическими и кинематическими условиями) включают обязательное соотношение между внешними моментами, приложенными к ведущему и ведомому звеньям, соответственно, М0 > Мс,
, ,-шах , , ,
и силовое условие заклинивания самотормозящегося механизма имеет вид Мтр > Мс,
ш
где Мт
тр - соответствующий М0 реализуемый максимальный момент трения [2].
Очевидно, что наибольшие перспективы для использования в качестве выпрямителей имеют самотормозящиеся механизмы, поэтому изучение процесса самоторможения является актуальной задачей теории клиновых МСХ. В настоящей статье приводятся результаты исследования поведения моделей МСХ в стоповом режиме нагруже-ния. Целью моделирования являлось определение минимальных значений коэффициентов трения, обеспечивающих самоторможение механизма при заданных геометрических параметрах элементов. Анализ выполняли при помощи неконсервативной граничноэлементной модели [2]. Описание процедур контактного алгоритма разработанной вычислительной системы приведено в [3].
Краткое описание расчетной модели. Упругая граничноэлементная модель клиновых МСХ базируется на ряде упрощающих допущений, позволяющих построить плоский аналог пространственной контактной задачи. Расчетная схема триботехнической системы МСХ представлена на рис. 1. Механизм состоит из вала-эксцентрика 1, ведущей и ведомой обойм 3 и 5, клина 4. Постоянный контакт клина с обоймами обеспечивает прижимное устройство, состоящее из пружины 6 и упора 7, жестко связанного с валом-эксцентриком. Для снижения потерь на трения в зоне контакта с эксцентриком ведущая обойма имеет радиальный подшипник скольжения 2.
Считаем, что внешняя нагрузка передается только через контакт клина с обоймами и по их ширине распределена равномерно, элементы МСХ имеют идеально сопрягаемые контактные поверхности. Вал-эксцентрик является абсолютно жестким телом, подшипник, обоймы и клин — идеально упругими. В области контакта вала-эксцентрика с жестко закрепленным в ведущей обойме радиальным подшипником отсутствует трение. В областях контакта клина с обоймами силы трения подчиняются закону Амонтона.
Упругие свойства тел задают значения материальных констант — модуля Юнга (Е) и коэффициента Пуассона (V). Конфигурацию звеньев фрикционной модели механизма определяют геометрические параметры: эксцентриситет е, радиусы вала (подшипника) и обойм (клина), соответственно, г0, г, Я, Яь толщина подшипника к и углы радиальных срезов клина фь ф2.
В стоповом режиме внешняя нагрузка создается приложенным к ведущему валу-эксцентрику вращающим моментом М0. Под действием момента происходит упругая деформация подшипника. Его внутренняя поверхность разбивается на две области — контактную (ЕР) и свободную от нагрузки (БОР), в пределах которой между телами возникает зазор. Итерационная процедура моделирования процесса инкрементального нагружения МСХ использует в качестве параметра, связанного с процессом деформирования, малый угол е поворота жесткого вала относительно общего центра механизма в направлении момента М0. На каждом этапе нагружения величина момента пропорциональна значению этого угла, определяющего размеры области контакта и интегральное значение момента, зависящего от распределения контактных напряжений в этой области. В отсутствии сил трения упругие перемещения происходят по нормали к недеформированной поверхности подшипника ип = /(е, ф), где е — угол поворота эксцентрика; ф — центральный угол, определяющий положение исследуемой точки в формируемой области контакта ЕР. Распределения нормальных давлений стп в области ЕР связаны со значением момента внешней нагрузки интегральным соотношением
Решение контактной задачи при кусочно-постоянной аппроксимации контактных характеристик сводится к решению составленной для узловых значений нормальных и касательных перемещений (ип, и,,) и поверхностных усилий (стп, ст5) системы алгебраических уравнений следующего вида [2]:
где [С] — матрица коэффициентов влияния; {X} — вектор неизвестных граничных параметров; {Y} — вектор линейных комбинаций известных параметров, задаваемых как граничные условия на контурах элементов.
Внешние геометрические связи триботехнической системы воспроизводили ограничения перемещений на наружном контуре ведомой обоймы un = us = 0, (x, y) e KNK. На свободных от нагрузки поверхностях элементов выполнялись статические условия стп3 = стп5 = 0, as3 = as5 = 0, (x, y) e BPD, ALC. Условия взаимодействия элементов МСХ в трех контактных зонах: подшипника 2 с ведущей обоймой 3, а также обойм 3 и 5 с клином 4 формулировались в виде условий непрерывности нормальных компонент перемещений и напряжений, а также ограничений модуля касательных напряжений в рамках закона трения: Un2 = Us2 = Vn2 = Vn3, Vs2 = ^ (x, У) e GPH, Un3 = -Un^ Vn3 = Vn^ ы < /bdi^ IM < fBD^ntl (x, У) e BD, Un4 = Un5, Vn4 = Vn5, ы < hA^n^
| CTs5 | < /АС|CTn5 | , (x, y) e AC, где /BD, /АС — реализуемые на границах клина коэффициенты трения. Знак минус в условиях непрерывности перемещений является следствием
(1)
EF
[ C ] {X} = { Y},
(2)
противоположных направлений локальных координат на контурах тел. Нагрузка F от поджимающей клин пружины приводилась к нормальному давлению <3р = стп3, ст53 = 0, (х, у) е СВ. Здесь буквенные и цифровые обозначения соответствуют обозначениям и позициям элементов на рис. 1.
Наличие неидеальных внутренних связей определяет особые условия деформирования механизма, которые связаны с изменяемостью нагружаемой структуры. Поэтому нелинейный анализ МСХ осуществляли с помощью итерационной
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.