ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА
Том 78. Вып. 1, 2014
УДК 531.36:534.1
© 2014 г. А. А. Зевин
К ТЕОРИИ ПАРАМЕТРИЧЕСКИХ КОЛЕБАНИЙ
Обсуждается корректность существующих определений параметрических колебаний линейных и нелинейных систем. Указана возможность ошибочного выбора параметрической математической модели взамен автоколебательной, связанная с существованием в таких системах одинаковых периодических решений. Установлены некоторые нелокальные свойства параметрических колебаний в гамильтоновых системах. В частности, показано, что области устойчивости выпуклы по частоте параметрического возбуждения (т.е., все точки между границами соседних областей неустойчивости отвечают устойчивым решениям). На критические частоты параметрического резонанса обобщены известные теоремы Релея и Журавлёева о поведении частот собственных колебаний при изменении жесткости и инерции. Для векторных уравнений Хилла установлены некоторые дополнительные утверждения о границах первой области неустойчивости.
Большинство известных исследований параметрических колебаний посвящено разработке аналитических и численных методов проверки устойчивости и их применению к конкретным системам ([1—5] и др.). Некоторые общие результаты, полученные асимптотическими методами, обоснованы только для систем с малым параметрическим возмущением. Ниже построены элементы качественной теории параметрических колебаний, свободной от указанного ограничения.
1. Об определении параметрических колебаний. Математические модели различных динамических систем в механике, теории автоматического регулирования, задачах динамической устойчивости упругих систем и других областях науки и техники описываются линейными однородными дифференциальными уравнениями с периодическими коэффициентами
Зачастую коэффициенты уравнения (1.1) представляют собой некоторые физические параметры системы (массы, жесткости упругих связей и т.д.). Поэтому колебания в таких системах обычно называют параметрическими, определяя их как колебания, вызванные периодическим изменением параметров системы.
Такое определение представляется неточным. Во-первых, коэффициенты уравнения (1.1) могут не представлять параметры системы; например, в параметрической модели висячих мостов периодичность коэффициентов обусловлена срывом вихрей Кармана [3]. Во-вторых, периодическое изменение параметров далеко не всегда приводит к уравнению с периодическими коэффициентами. Так, малые колебания маятника с вибрирующей в вертикальном направлении точкой подвеса описывается уравнением
х = А(Ш)х, х е Я п; А(ш I) = А(ш I + 2п) = [ак (ш I)]
|П
и,к=1
(1.1)
2
х + (ш0 + р(ы 1))х = 0
(1.2)
где х — угловая координата маятника, р(ш I) = р(ш I + 2 п) — приведенное ускорение точки подвеса. Если последнее считать параметром, то колебания в системе (1.2) подпа-
дают под приведенное определение. Но тогда при горизонтальных колебаниях точки подвеса ее ускорение также следует считать параметром; между тем такая система описывается уравнением
x + Ю0 x = p((üt)
Аналогично колебания упругого стержня, сжатого продольной периодической силой, описываются уравнениями вида (1.1) [1], в то время как эта же сила, направленная перпендикулярно оси, приводит к неавтономной системе с постоянными коэффициентами. Напротив, колебания кругового стержня с распределенной радиальной периодической нагрузкой описываются уравнением с периодическими коэффициентами [6], и т.д.
Сам термин "параметрические колебания" также неточен. Дело в том, что обычно интерес представляет устойчивость положения равновесия x = 0 системы (1.1), а не ее колебания (последние вообще определены с точностью до постоянного множителя). По-видимому, поэтому в монографиях [2, 3, 5] вместо него используется термин "параметрический резонанс".
Учитывая приведенные соображения, целесообразно называть параметрическими колебания в любой однородной линейной системе с периодическими коэффициентами без указания физического смысла последних (заметим, что такое определение используется, например, в справочнике [6]).
Для нелинейных систем общее определение параметрических колебаний отсутствует. В случае одной степени свободы параметрическими называют [7] колебания в системах
x + h(x, x) + [1 + p(rnt)]f(x) = 0 (1.3)
и
x + h(x, x) + [1 + p(at)]k2 x + f(x) = 0 (1.4)
где
p(rnt) = p(rnt + 2 n), f (0) = 0
В силу последнего условия x = 0 — положение равновесия. Параметрические колебания — это семейства решений x¡(t, s) с периодами T¡(s) = 2n/rn¡ (s) и T¡(s) = 4л/ю,- (s), рождающиеся из этого положения. Величины ю((0) равны критическим частотам параметрического резонанса (границам областей устойчивости) линеаризованной системы. В отличие от периодических решений системы (1.1), решения уравнений (1.3), (1.4) имеют самостоятельное значение.
В случае нелинейной системы и-го порядка
x = f(x, юt), x е Я"; f(x, ©t) = f(x, Ш + 2n); f(0, t) = 0 (1.5)
линеаризованное относительно x = 0 уравнение имеет вид (1.1). Поэтому колебания в системе (1.5), рождающиеся из этого положения, естественно называть параметрическими.
2. О параметрических моделях динамических систем. Рассмотрим автономную систему
x = f(x), x е Я", f (0) = 0 (2.1)
Запишем уравнение (2.1) в виде
1
x = C(x)x, C(x) = | fx(sx)ds
0
Предположим, что уравнение (2.1) имеет решение х(1) = х( + Т). В силу соотношений (2.2) х(7) является также решением уравнения
х = А(1)х, А(0 = А(1 + Т) = С(хЦ)) (2.3)
Таким образом, любое периодическое решение автономной системы, имеющей положение равновесия, совпадает с решением некоторой линейной системы с периодическими коэффициентами. В связи с этим может показаться, что можно исследовать устойчивость решения х(1) с помощью уравнения (2.3), используя результаты теории линейных параметрических колебаний. Такой подход, однако, совершенно некорректен. Наличие общего решения х(1) в системах (2.1) и (2.3) отнюдь не означает, что оно одновременно устойчиво либо неустойчиво. Дело в том, что устойчивость решения х(1) системы (2.1) определяется уравнением в вариациях
у = Ао(7)у, Ао(0 = /Х(х«)) (2.4)
которое отлично от уравнения (2.3). В частности, решение х(1) системы (2.1) может быть асимптотически устойчивым, в то время как в линейной однородной системе (2.3) такая устойчивость для периодического решения в принципе невозможна (в ней существует семейство решений сх(7)).
Например, уравнение Ван дер Поля 2
х + (х - 1) х + х = 0
имеет единственное ненулевое периодическое решение хо(7) = + Т), к которому асимптотически приближаются остальные решения. Очевидно, уравнение
2
х + а (7)х + х = 0, а(() = а(( + Т) = хо(()-1 также имеет решение *0(0, однако здесь оно в лучшем случае лишь устойчиво по Ляпунову.
Совпадение решений автоколебательной и параметрической систем может приводить к ошибкам при построении математических моделей физических систем. Характерным примером такой ошибки может служить параметрическая модель качелей ([3, 8-10] и др.).
При катании на качелях приседают при движении вниз и встают при движении вверх, поэтому приведенная длина качелей 1() максимальна, когда угловая координата х,.() « 0, и минимальна при максимальных отклонениях. В установившемся режиме х() и 1() — периодические функции. Поэтому уравнение колебаний маятника с периодической длиной
+ у — + gl (Овтх = 0 (2.5)
А
при Щ) = 1$) имеет решение хр(7) = х5(7). Так как за период колебаний качелей Т происходят два приседания, то величина Травна удвоенному периоду функции Такое соотношение характерно для параметрических колебаний, что обычно служит обоснованием параметрической модели качелей.
Между тем такая модель ошибочна. Дело в том, что в качелях функция 1() не задана априорно, а определяется движением качелей. Любое возмущение последнего немедленно приведет к нарушению периодичности приседаний (т.е. функции 4(0). Следовательно, длина качелей 15 = 15 (х(1), х(г)), в то время как в уравнении (2.5) Щ) — заданная функция.
Таким образом, качели — автономная, а маятник — неавтономная система. Поэтому при одном и том же решении х(1) соответствующие уравнения в вариациях для маятника и качелей различны. Последнее содержит также вариацию функции 1(х, х). В результате оказывается, что режим, который всегда устанавливается при колебаниях ка-
А
А
12(0 Ах А _
Фиг. 1
челей (длина 1() максимальна при х$) « 0), при колебаниях маятника неустойчив для всех амплитуд А е (0, п). Напротив, в случае маятника устойчивы колебания, при которых длина /(?) минимальна при х(() « 0, если их амплитуда А < А* е (п/2, п) (при А > А* неустойчивы оба решения). Имеется строгое доказательство этих результатов, а также более детальное обсуждение модели качелей [11—13].
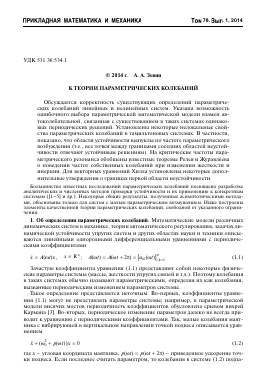
На фиг. 1 представлены установившиеся колебания маятника х, (т) = х, (т +1) (сплошные линии) при I,(т) = 10 + со8 4лт (штриховые линии), где т = юI/4п. Решения найдены численным интегрированием уравнения (2.5) при
10 = 3 м, = 0.1 м, ц2 = 0.3 м, = 0.5 м, ю = 2ю0 = = 1.808 1/с
у = 0.1 м/с
Сходимость имела место в широком диапазоне начальных условий, однако длительность переходного процесса 9 достаточно велика (в среднем 9 « 250). При этом сходимость к периодическому решению немонотонна, в то время как в качелях траектории монотонно приближаются к предельному циклу (последнее объясняется тем, что в автономной системе фазовые траектории не пересекаются). Как видно, при установившихся колебаниях длина маятника максимальна в крайних положениях и минимальна при прохождении положения равновесия, что полностью согласуется с указанными выше теоретическими результатами.
Итак, в автономной системе (качели) при любых начальных условиях устанавливается периодический режим определенного типа. В неавтономной системе (маятник периодической длины) такой режим не устанавливается ни при каких начальных условиях ввиду его неустойчивости. С учетом этих фактов несостоятельность параметрической модели качелей очевидна.
Приведенные результаты показывают, что для любой физической системы использование параметрической модели оправданно, только когда возмущающие силы не зависят от ее фазовых координат, бу
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.