№ 2
ИЗВЕСТИЯ АКАДЕМИИ НАУК ЭНЕРГЕТИКА
2014
УДК 621.313
© 2014 г. ИСМАГИЛОВ Ф.Р., ВАВИЛОВ В.Е., ХАЙРУЛЛИН И.Х.1
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИНХРОННОГО ГЕНЕРАТОРА С ПОСТОЯННЫМИ МАГНИТАМИ С УЧЕТОМ ПРОЦЕССОВ В ПОДШИПНИКОВЫХ ОПОРАХ
Разработана математическая модель синхронного генератора на постоянных магнитах с учетом процессов в подшипниковых опорах. Представлено решение разработанной математической модели для частного случая синхронного генератора на постоянных магнитах на гибридных магнитных подшипниках.
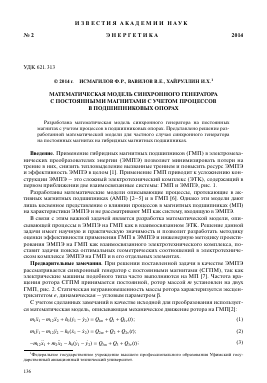
Введение. Применение гибридных магнитных подшипников (ГМП) в электромеханических преобразователях энергии (ЭМПЭ) позволяет минимизировать потери на трение в них, снизить тепловыделение вызванные трением и повысить ресурс ЭМПЭ и эффективность ЭМПЭ в целом [1]. Применение ГМП приводит к усложнению конструкции ЭМПЭ — это сложный электротехнический комплекс (ЭТК), содержащий в первом приближении две взаимосвязанные системы: ГМП и ЭМПЭ, рис. 1.
Разработаны математические модели описывающие процессы, протекающие в активных магнитных подшипниках (АМП) [2—5] и в ГМП [6]. Однако эти модели дают лишь косвенное представление о влиянии процессов в магнитных подшипниках (МП) на характеристики ЭМПЭ и не рассматривают МП как систему, входящую в ЭМПЭ.
В связи с этим важной задачей является разработка математической модели, описывающей процессы в ЭМПЭ на ГМП как в взаимосвязанном ЭТК. Решение данной задачи имеет научную и практическую значимость и позволит разработать методику оценки эффективности применения ГМП в ЭМПЭ и инженерную методику проектирования ЭМПЭ на ГМП как взаимосвязанного электротехнического комплекса, поставит задачи поиска оптимальных геометрических соотношений в электротехническом комплексе ЭМПЭ на ГМП и в его отдельных элементах.
Предварительные замечания. При решении поставленной задачи в качестве ЭМПЭ рассматривается синхронный генератор с постоянными магнитами (СГПМ), так как электрические машины подобного типа часто выполняются на МП [7]. Частота вращения ротора СГПМ принимается постоянной, ротор массой т установлен на двух ГМП, рис. 2. Статическая неуравновешенность массы ротора характеризуется эксцентриситетом е, динамическая — угловым параметром р.
С учетом сделанных замечаний в качестве исходной для преобразования используется математическая модель, описывающая механическое движение ротора на ГМП[2]:
тх - ^12X2 + ¿оО>1 - У2) = Оы + 01 + &Л0; (1
ту 1 - т12У2 - ¿0(*1 - Х2) = 02т + 02 + 02у(?) (2)
-т!2*1 + т2Х2 - Но(У1 - У2) = 0зт + 0з + 0зу(0; (3)
Федеральное государственное учреждение высшего профессионального образования Уфимский государственный авиационный технический университет.
Гибридный магнитный подшипник
Г
„ Т ЭМПЭ В систему
управления
Рис. 1. ЭМПЭ на ГМП
-тиУ1 - т2у2 + к0(х1 - хс2) = + + (4)
где 0\т — 04т — электромагнитные силы в МП; Ql — Q4 — внешние силы; =
2 2 2 2 = ^(г2«»®/) - (/ -/з)еЮ (шп); 0,(0 = ^(¿Ушю) - ^(-совшt); 0^(0 =
2 2 2 2 = т^_(_г1сови{) - (/1 - / з)ею (-втю0; е4у(0 = ^(-^тш?) - (/1 - |з)еЮ (С08И?);
е — эксцентриситет ротора; т — масса вала с ротором; I — длина вала с ротора; ю — ча-
, /1 + тг2 /1 + тг1 г 2
стота вращения ротора; J1 — момент инерции вала; т1 = —■—2—2; т12 = —--2 1 2;
2
/1 + тг1 , Т ,л
т2 = ——2—— изменение массы ротора; А = /3ю// , Х2, У1, У2 — радиальные смещения
внутреннего магнитного кольца относительно внешнего в первом и втором ГМП соответственно; z1, 12 — осевые смещения в первом и втором ГМП соответственно; £1, х2, У1, У2 — вторые производные от перемещений по времени.
Используется также математическая модель синхронного генератора в координатах Я [8]:
й 1 Я
=— ий ~ — 'д +у-РЫд; (5)
й ^й ^й ^й
1 • 1 Я • , Ь— . рюу. ,,,
~1д = - Щ--+—РЮ1( ---^; (6)
1г Ьц Ьц Ьц Ьц
Ие = 1,5р(у + (Ь— - Ьц)1—!д); (7)
— ю = 1(М - ктрю- Ме), (8)
где , ¡9 — проекции токов статора на оси q и й; и—, иц — проекции напряжений подводимых к статору на оси q и й; Ь(, Ьц — индуктивности на оси q и й; р — число пар полюсов; V — потокосцепление фазы статора; Мм — механический момент привода; ктр — коэффициент, учитывающей трение в подшипниках; / — момент инерции; Ме — электромагнитный момент; Я — активное сопротивление обмотки ЭМПЭ.
Для упрощения математического анализа используются следующие допущения:
— магнитная проницаемость постоянных магнитов неизменна;
— магнитная проницаемость окружающей среды равна магнитной проницаемости вакуума;
— ввиду симметричности процессов в обоих ГМП, рассматривается только одна опора;
— магнитная цепь системы управления ГМП не насыщена;
— воздушный зазор СГПМ равен воздушному зазору ГМП.
Решение задачи. С учетом того, что первый и второй ГМП симметричны, рассматриваются процессы только в одной опоре, при этом суммирование левых и правых частей выражений (1)—(4) приводит к следующему :
2 4
Ж(Х1 + у 1) % = X (От + О + йу(О). (9)
1 I = 1
Раскладываем внешние силы по экспликации к выражениям (1)—(4), приводим подобные члены, при этом пропускаем промежуточные вычисления:
Ю2{ 008юг + юг} =
' 4
X ( От + )
л -1
- (*1 + У1) Г. (10)
ет^ 1е
Из выражения (8) определяется электромагнитный момент:
Ме = М - к ю- 1 — ю (11)
—
с учетом выражения (7), имеем
М = 1,5р(у + (Ь— - Ьд) + ктрЮ + I — ю. (12)
Выражение (12) с учетом (10) позволяет оценивать влияние силовых, геометрических параметров в ГМП на электрические параметры в СГПМ.
Помимо влияния на электрические параметры СГПМ, процессы в ГМП влияют и на его магнитные параметры, так появление смещения в ГМП приводит к увеличению эксцентриситета в СГПМ. Результирующий эксцентриситет в СГПМ на ГМП
е = е0 +4х 2 + У2, (13)
где е — результирующий эксцентриситет; е0 — начальный эксцентриситет в СГПМ; Х1,У1 — смещение ротора в ГМП по оси х и у соответственно.
Изменение эксцентриситета влияет на магнитное поле в воздушном зазоре СГПМ и на его потокосцепление [9, 10]. С учетом допущений о равенстве воздушных зазоров СГПМ и ГМП индукция и потокосцепление СГМП могут быть представлены в виде:
В (a, t) = M0Fp cos(pCT-mt); (14)
5о + ecos a
V (t) = ^B(o, t)2 lpT, (15)
n
где а — угловая координата ротора; Fp — магнитодвижущая сила в воздушном зазоре СГПМ; 80 — номинальный воздушный зазор СГМП на ГМП; ^ф — число витков в фазе СГПМ.
Магнитодвижущая сила в СГПМ определяется характеристиками применяемых ПМ:
Fp = Ис1р, (16)
где Ис — коэрцитивная сила ПМ ротора СГПМ; lp — активная длина ПМ ротора СГПМ. Имеем:
ГЛ Л/Т тг 2 т COs(pG-©t)
¥ (t) = wфMоHclv--Т-^-'-. (17)
п оо + e cos а
Основная задача ГМП — обеспечение левитации ротора СГПМ в магнитном поле, при этом, как показано в работе [11], коэффициент трения в СГПМ на ГМП:
То + C ( T
3/2
У о I — I £ пЛп
кТр -, (18)
5 X ( + О + 0^(0)
I -1
где С — постоянная Сазерленда; Т0 — температура воздуха в воздушном зазоре в момент запуска генератора; у0 — кинематическая вязкость воздуха в момент запуска генератора; Т — температура воздуха в момент времени t; у — кинематическая вязкость воздуха в момент времени V; Б — площадь контакта; В — диаметр вращающейся части; 5 — воздушный зазор; т — масса ротора с ГМП; ш — частота вращения ротора СГПМ.
Математическая модель синхронного генератора с постоянными магнитами с учетом процессов в подшипниковых опорах. По результатам проведенных авторами математических преобразований и с учетом вышеизложенных допущений может быть сформулирована математическая модель СГПМ с учетом процессов в подшипниковых опорах, которая может быть использована при исследованиях процессов в СГПМ на любых подшипниках:
Т
(19)
(20)
М -1,5р(у1я + Т - Т)1й1ч) - кТр& = 0; (21
I
d . — id dt 1 = — Ud Ld R Ld ■ Л ■ iq p&iq; Ld
d . dt 4 = T uq Lq R Lq ■ Ld . lq +~dp&ld Lq p®v.
ю2 { cos ю t + sin ю t}
4
£ ( Qim + Q,)
Li - 1 .
- (*1 + У1) r1; (22)
emz1 le
I 2 2 е = е0 + V х + у ;
ГЛ ЛуТ и /2 2т 008(р0-©г)
¥ (?) = щМоИс1р--—^-
п оо + е008 о
(24)
При исследованиях СГПМ на бесконтактных подшипниковых опорах к (19)—(24) следует добавить выражение (18).
Разработанная математическая модель позволяет исследовать систему СГПМ — подшипниковый узел как единый комплекс и оценивать взаимовлияние его узлов.
Для повышения точности подобных исследований можно уменьшить используемые допущения, в частности допущения о постоянстве частоты вращения генератора и отсутствии перемещений во второй подшипниковой опоре. Тогда математическая модель будет состоять из выражений (1)—(8), (13), (17) что значительно усложнит ее решение. Следует отметить, что в большинстве случаев в подобных усложнениях нет необходимости, так как процессы в обоих опорах вследствие симметричности аналогичны. Рациональным и точным решением разработанной математической модели является численное решение с использованием современных программных средств, например пакета МайаЬЗтиИпк [12].
Математическая модель синхронного генератора с постоянными магнитами на гибридных магнитных подшипниках. Частным случаем разработанной математической модели является ее преобразование для ЭТК СГПМ на ГМП. При этом электромагнитные силы в ГМП 1 определяются разработанными авторами в работах [13—16] выражениями:
(25)
йгй = -1 ий "й Я ■ Л ■ 1д + -*- рю 19; "й
й1 йгд - Т- Я "д ■ "й • 1ч +-йр(Й 1й "д
М -1,5р(+ {Ьа - Ь9)гйг ) - £ТрЮ = 0;
(26) (27)
Ю { 008Ю? + 8ШЮ=
/ 2 2 е = е0 + V х + у ;
X ( От + 0>)
ет11
- (Х1 + У1) ^;
1е
ГЛ л* и }2 2т008(р0-юг).
¥ (г) = ^фМоНс1р--—^-;
п оо+ е008 о
У о
То + — ( Т
к — -
^тр
Т + С\Т0
3/2
5 пБп
Ъ(mg + ¥г)
р1 = —"22 (2к р1у (г1 - *2) - кр2 уЧ + кр3уЬ) + Ррту; 25
4 = и - (кр1у - кр2у)) - г1
4 С"к"2 у^ = и - (крзу - кр1у )) - П,,
йг
йц
25 —!}2
йг
йу
йг
25
йг
(28)
(29)
(30)
(31)
(32)
(33)
(34)
4
F =
Cl 25:
• (2kp1x(i3 - «4 ) - kp2xh + kp3x'2 ) + Qx + Fp,
4 ^ix
3 = и - Ц.(kpix - kP2x)) - г'з;
4 CtkL2x UJ4 = U - ^ (kp3x - kpix)) - ri4;
di4
25
CLi4
dt
dx
dt
F _ 2Br lpm
РтУ _ M p
25
п - b
ci ci
dt
=arctg
' + ci)
arctg
(ci - b
П-2 6 п-2 n-2 6 n—
\jb - c1 -\/b - c1 -у/b - c1 -\/b -
2 ci
F _ - 2Br lpm
Fpmx M0 p
-n + b
.4br-72
arctg
I + c)
arctg
(c - b)
/72 2 /72 2 /72 2
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.