ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 3, 2010
УДК 629.7.054.011
© 2010 г. Джашитов В.Э., Панкратов В.М.
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ТЕРМОУПРУГОГО НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ, ТЕМПЕРАТУРНЫХ И ТЕХНОЛОГИЧЕСКИХ ПОГРЕШНОСТЕЙ ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ДАТЧИКА ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ1
Построены и исследованы связанные математические модели тепловых процессов, термоупругого напряженно-деформированного состояния, температурных и технологических погрешностей волновых твердотельных датчиков инерциальной информации. На основе построенных конечно-элементных моделей проведен анализ термоупругого напряженно-деформированного состояния датчика. Получены качественные и количественные оценки температурных и технологических погрешностей датчика, как функций его параметров и действующих возмущений. Выработаны рекомендации по обеспечению эффективного функционирования датчика.
Введение и постановка задач. Традиционно малогабаритный волновой твердотельный датчик инерциальной информации об угловом положении и движении подвижных объектов — волновой твердотельный гироскоп (ВТГ) считается одним из перспективных приборов наряду с микромеханическими, волоконно-оптическими и некоторыми другими типами датчиков.
Теория этого прибора достаточно хорошо разработана [1, 2]. Анализ информации за последние несколько лет [3—6] показал, что основные усилия разработчиков и исследователей ВТГ направлены на совершенствование методов управления колебаниями резонатора, на улучшение характеристик ВТГ и др.
Вместе с тем современные точные, высоконадежные и малогабаритные ВТГ [3, 7—10] должны функционировать в условиях достаточно жестких температурных воздействий. Например температуры окружающей среды могут варьироваться в широком диапазоне (—50++80)° и быть нестационарными. Такие тепловые воздействия приводят к сложному изменению напряженно-деформированного состояния (НДС) датчика, недопустимым внутренним температурам и, в конечном итоге, к погрешностям и нарушениям нормального функционирования прибора.
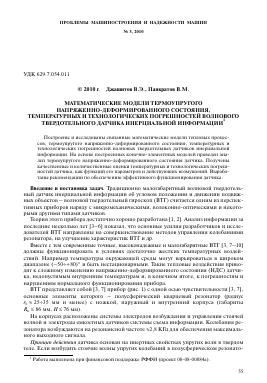
ВТГ представляет собой [3, 7] прибор (рис. 1) с одной осью чувствительности [3, 7], основные элементы которого — полусферический кварцевый резонатор (радиус г0 « 25+35 мм и менее) с ножкой, наружный и внутренний корпуса (габариты Як < 86 мм, Н< 76 мм).
На корпусах расположены системы электродов возбуждения и управления стоячей волной и электроды емкостных датчиков системы съема информации. Колебания резонатора возбуждаются на резонансной частоте «2,8 КГц для обеспечения максимального выходного сигнала.
Принцип действия датчика основан на инертных свойствах упругих волн в твердом теле. Если возбудить стоячие волны упругих колебаний в полусферическом резонато-
1 Работа выполнена при финансовой поддержке РФФИ (проект 08-08-00084а).
Рис. 1. 1 — полусферический кварцевый резонатор с ножкой; 2, 3 — кварцевые корпуса; 4 — керамическая колодка; 5,6 — гермовыводы; 7 — кожух; 8 — вакуумный насос
ре, то вращение основания, на котором установлен резонатор, вызывает поворот стоячей волны на определенный угол.
Разработанная к настоящему времени теория ВТГ [1—6] не охватывает вопросов, связанных с работой прецизионного прибора в условиях температурных воздействий и изучения влияния на выходные характеристики ВТГ технологических погрешностей изготовления элементов прибора и технологических допусков на его параметры.
Цель работы — обеспечение эффективного функционирования волнового твердотельного датчика инерциальной информации на основе учета и анализа его температурных и технологических погрешностей с помощью построенной комплексной математической модели прибора.
Для достижения цели ставятся и решаются связанные задачи: построение и исследование математических моделей тепловых процессов и конечно-элементных моделей термоупругого НДС волнового гироскопа; построение и исследование математической модели температурных и технологических погрешностей ВТГ; оценка эффективности работы датчика по точности измерений с учетом температурных и технологических погрешностей.
Математические модели тепловых процессов и конечно-элементные модели НДС волнового гироскопа. Задачу построения математической модели тепловых процессов, расчета и визуализации температурных полей ВТГ решали [7] модифицированным методом элементарных тепловых балансов.
Основной алгоритм расчета температурных полей с помощью метода элементарных тепловых балансов универсален для датчиков авиакосмического приборостроения [7] (в том числе и для волнового твердотельного гироскопа), хорошо апробирован и подробно описан в [7, 11]. В соответствии с основными положениями метода элементар-
Рис. 2. Ножка и резонатор (объемы 1—8, 9—184); корпус (185—312); ТС1, Т^ — температуры наружной и внутренней окружающей среды; ТС3 — температура основания; ^^ — тепловые связи с окружающей средой
ных тепловых балансов для построения тепловой модели (рис. 2) датчика, он разбивается на конечные твердотельные объемы (элементы). Количество объемов (опорных расчетных точек, в каждой из которых определяется температурное поле с течением времени) 312.
Реализованный в виде программного комплекса на компьютере основной алгоритм метода элементарных тепловых балансов составляет основу математической модели тепловых процессов в рассматриваемом приборе и позволяет определять температурное поле в каждой расчетной точке с течением времени.
Конечно-элементная модель резонатора и всего ВТГ, сгенерированная с помощью пакета представлена на рис. 3. Конечно-элементные модели ВТГ позволяют
Рис. 3
рассчитывать и визуализировать его термоупругое напряженно-деформированное состояние.
Входные параметры этих моделей — геометрические и теплофизические характеристики датчика и его элементов, условия их закрепления и тепловые воздействия. Выходные характеристики — это поля температур, деформаций, перемещений и напряжений элементов ВТГ, как функций его входных параметров.
Математическая модель температурных и технологических погрешностей ВТГ. Рассмотрим систему "температурно" или "технологически" возмущенных уравнений ВТГ [1, 2] с учетом диссипативных сил, второй формы колебаний и управляющих гармонических сил при измеряемой угловой скорости Q = const
2
x + ц*x + ю (x + xT) + 2пШ = FsinXt,
2
y + + ю (y + yT) - 2пШХ = FcosXt; (1)
Y( t) = -0,125 [ 2 + v -V (2 + v)2 + 16( 1 - v) ]Q t/(1 - v),
где x(t), y(t) — перемещения кромки полусферического резонатора по измерительным осям системы съема информации в системе координат 0xy, связанной с корпусом ВТГ; ц* = ц + цт — коэффициент демпфирования; ц — номинальное значение; ю = X + XT —
частота колебаний; X — номинальное значение резонансной частоты; XT, цт — малые температурные или технологические составляющие; xT, yT — малые температурные или технологические смещения кромки резонатора; 2пШУ , 2пШХ — силы Кориоли-са; п — безразмерный коэффициент, учитывающий массовые и геометрические характеристики резонатора; y(t) — угол поворота стоячей волны относительно резонатора; F — амплитуда управляющих гармонических сил; v — коэффициент Пуассона; Qt — угол поворота корпуса ВТГ.
В случае исследования влияния температурных воздействий на точность датчика (температурный дрейф) необходимо [7] получить соответствующие данные о значени-
ях параметров с индексом " T" на основе изучения математических моделей тепловых процессов и построенных конечно-элементных моделей ВТГ. При изучении влияния технологических изменений параметров датчика на его точность (технологический дрейф) значения этих параметров задаются как исходные данные в виде системы допусков со своими знаками на номинальные значения параметров.
Применим разработанную для микромеханических гироскопов методику [7] качественных и количественных оценок температурного или технологического дрейфа ВТГ на основе уравнений (1). Согласно этой методике, записываются суммы сил для датчика на неподвижном основании при наличии погрешностей, затем записываются суммы сил для датчика на подвижном основании (О = const Ф 0), но без учета погрешностей.
Приравнивая эти суммы и разрешая уравнение относительно О, получим выражения для приближенной оценки угловой скорости дрейфа ВТГ
Качественный анализ (2) показывает следующее.
Первые два слагаемых в (2) определяют "переменные" составляющие дрейфа за счет температурных или технологических отклонений демпфирования цт и резонансной частоты Хт от номинальных значений.
Последнее слагаемое в (2) — это "постоянная" составляющая дрейфа, определяемая температурными или технологическими изменениями формы резонатора в плоскости стоячей волны.
При сравнительно большой добротности резонатора (ц/п ^ дрейф ВТГ, определяемый температурными или технологическими изменениями хт формы резонатора, прямо пропорционален измеряемой угловой скорости, пропорционален квадрату резонансной частоты и обратно пропорционален амплитуде управляющих сил
При сравнительно малой добротности резонатора (ц/п ^ дрейф ВТГ, определяемый изменениями хт формы резонатора, не зависит от измеряемой угловой скорости, прямо пропорционален демпфированию, пропорционален квадрату резонансной частоты и обратно пропорционален амплитуде управляющих сил и силам Кориолиса
Для количественной оценки температурных и технологических погрешностей ВТГ будем искать частное решение возмущенной системы уравнений (1), определяющее вынужденные колебания [7] для микромеханических гироскопов, в виде
где Б0, Б1, Б2; Е0, Е1, Е2 — постоянные, которые надо определить.
Подставляя (3) и их производные в (1), получим систему алгебраических уравнений для Б0, Л1, Л2, Е0, Еь Е2 при наличии температурных или технологических погрешностей цтФ 0, ХтФ 0, хтФ 0, утФ 0
(2)
О* ~ ПХ2Хт/F.
Оxdr
^Х2Хт/(Рл).
х = D0 + D1cos X t + D2sin X t, y = E0 + E1cos Xt + E2sin Xt,
(3)
(Ю -X2)D1 + ц*XD2 + 2цпхЕ2 = 0,
22
(ю - X )D2 - ц*XD1 - 2^^XE1 = F,
22
(ю - X )E1 + ц*XE2 - 2n^XD2 = F,
2
2
2
2
(4)
2
22
(ю - X )E2 - ц*XE1 + 2n^XD1 = 0, D0 = -xT, E0 = -yT.
2
При отсутствии температурных или технологических погрешностей цт = 0, XT = 0, xT = 0, yT = 0, т.е. ю = X, ц* = ц ("идеальный" В
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.