ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 1, 2014
АВТОМАТИЗАЦИЯ И УПРАВЛЕНИЕ В МАШИНОСТРОЕНИИ
УДК 629.7.054.011
© 2014 г. Джашитов В.Э., Панкратов В.М., Голиков А.В.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ УПРАВЛЕНИЯ ТЕМПЕРАТУРНЫМИ ПОЛЯМИ
БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ВОЛОКОННО-ОПТИЧЕСКИХ ДАТЧИКАХ
Построены и исследованы математические модели активной двухконтурной реверсивной системы терморегулирования на термоэлектрических модулях Пельтье, предназначенной для управления температурными полями отдельных волоконно — оптических инерциальных датчиков и бесплатформенной инерциальной навигационной системы, содержащей эти датчики. Разработано поддерживающее программное обеспечение, выбраны параметры системы терморегулирования, получены оценки функционирования динамических систем при сложных тепловых воздействиях.
Постановка задач. Волоконно-оптический инерциальный датчик (гироскоп) — сокращенно ВОГ — один из широко применяющихся и перспективных приборов наряду с микромеханическими, волновыми твердотельными и другими типами датчиков. Эти датчики являются неотъемлемой частью бесплатформенных инерциальных навигационных систем (БИНС), предназначенных для навигации и управления широкого класса подвижных объектов.
Теория и практика ВОГ достаточно разработана [1—10]. Основные усилия разработчиков и исследователей ВОГ и БИНС с этими датчиками направлены на существенное повышение их точности.
Для обеспечения точностей ВОГ 0,1^0,01 град/час с успехом применяются [1 — 10, 13] пассивные способы борьбы с температурными воздействиями (термокомпенсация, специальные способы намотки волокна, тепловое шунтирование элементов, усовершенствования катушки и др.).
Для достижения инерциальных точностей ВОГ <0,01 град/час применения только пассивных способов недостаточно. При таких точностях существенны термоупругие деформации в единицы и доли микрометров, изменения масштабного коэффициента (МК) и другие "тонкие" температурные факторы, которые заранее невозможно предусмотреть и промоделировать. Например, для достижения точности ВОГ <0,01 град/час относительная погрешность масштабного коэффициента [1—6] должна быть <0,01%. С другой стороны, современные высокоточные ВОГ должны функционировать [2, 4, 7—10, 13] в условиях жестких температурных воздействий. Температуры
окружающей среды могут меняться в диапазоне (—60...+60)°С и более, причем изменения могут быть нестационарными.
Для достижения инерциальных точностей <0,01град/час кардинальным решением, является применение активных методов, заключающихся в создании многоконтурных реверсивных систем терморегулирования (СТР) отдельных ВОГ (внутренний контур для стабилизации температуры его элементов) и всей БИНС (внешний контур).
Активный метод регулирования температуры позволит существенно (на порядки) уменьшить любые температурные погрешности ВОГ и БИНС. Настоящая статья развивает исследования [6—10, 13], направленные на существенное повышение точности и эффективности приборов, разрабатываемых в НППК г. Пермь, НПП "Антарес", "Оптолинк" г. Саратов и др.
Объекты исследования — БИНС с ВОГ и акселерометрами [3, 10] и системы терморегулирования отдельных ВОГ и всей БИНС.
Цель работы — проработка теоретических и прикладных аспектов активного управления температурными полями ВОГ и БИНС с помощью реверсивной (нагрев-охлаждение) системы терморегулирования на основе модулей Пельтье [7, 11].
Для достижения цели поставлены и решены следующие задачи: построение адекватных математических моделей динамических систем ВОГ и БИНС с системами терморегулирования; аналитическое и численное исследование построенных моделей, выбор параметров системы терморегулирования, получение оценок работы рассматриваемых динамических систем при сложных тепловых воздействиях.
Для решения поставленных задач создано поддерживающее алгоритмическое и программное обеспечение.
Математические модели. В основе математических моделей, предназначенных для расчета нестационарных температурных полей ВОГ, БИНС и учитывающих применение систем терморегулирования на модулях Пельтье, заложен модифицированный метод элементарных балансов [7, 12]. В соответствии с [7], ВОГ или БИНС разбиваются на конечные объемы.
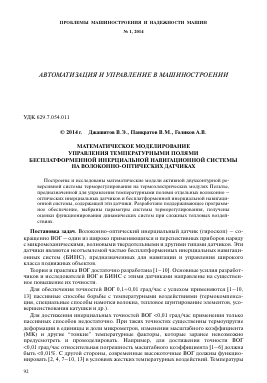
Тепловая модель ВОГ с системой терморегулирования (внутренний контур) с элементами, нумерацией объемов и тепловыми связями показана на рис. 1, а. На верхней поверхности крышки I ВОГ расположен модуль Пельтье XV, рабочая поверхность (спай) которого находится в тепловом контакте через теплопроводящую пасту с крышкой I и через нее с дном XIV, посадочным кольцом XIII и др. элементами. На наружном спае установлен через пасту радиатор XVI с вытяжным вентилятором XVII для эффективного теплообмена между наружным спаем и средой.
Тепловая модель БИНС с системой терморегулирования (внешний контур) с основными элементами, нумерацией объемов и тепловыми связями показана на рис. 1, б. На крышке IV имеется модуль Пельтье, рабочий спай которого имеет тепловой контакт через теплопроводящую пасту с крышкой IV и через нее с корпусом II, дном III, корпусом I с ЧЭ и др. На наружном спае установлен через пасту радиатор с вытяжным вентилятором.
Особенность БИНС (в отличие от ВОГ) в том, что внутри имеются источники тепла [3, 10]. Это акселерометры, платы на этажерной стойке VI и др. Суммарная мощность внутренних источников тепла БИНС <11Вт.
Основной алгоритм расчета температурных полей датчика или устройства, полученный на основе метода балансов, имеет вид [7]
Т( + А?) =
1 -
с,
(м \
А?
1Чи + ^
К 1=1
(м \
Т + — 1 ъТ] + чТ + 01
С,
К1=1
(1)
где 7(0, 7(? + Д?) — температуры ¡-го объема в настоящий и последующий моменты времени; Тс — температура среды; с — теплоемкость '-го объема; q¡j — термопроводимости между объемами ¡, у; qCc — термопроводимость между ¡-м объемом и средой; Q¡ —
б
-в
СЕВ«
УШ(59) (58)
оэ
сзэ
ОЭ»|
сечение А-А
в О
сзэ аэ
Схема креплений
Ам1
у
У1(19-52) 11(13)
|«ОЭ
111(14)
Рис. 1. Элементы и тепловые модели ВОГ (а) и БИНС (б) с системой терморегулирования: у ? —
тепловые связи между объемами и с окружающей средой; ТСЛГ, ТСу, Тк, Тт — температуры окружающей среды, корпуса и термоплаты; а — I — крышка; многофункциональная интегральная оптическая схема: II — крышка, III — модулятор, IV — плата, V — подставка, VI — корпус; VII — внутренний корпус; VIII — катушка для волокна; IX — волокно; X — прокладка; XI — внешний корпус; XII — промежуточное кольцо; XIII — посадочное кольцо; XIV — дно; XV — спаи модуля Пельтье; XVI — радиатор; XVII — вентилятор. б — I — корпус с ВОГ и акселерометрами; II — корпус; III — дно; IV — крышка; V — преобразователь напряжения; VI — этажерная стойка с платами; VII — спаи модуля Пельтье; VIII — радиатор; IX — вентилятор
мощность источников тепла или хладопроизводства; At — шаг расчета; М — количество объемов, имеющих тепловой контакт с ¡-м объемом; N — количество объемов; г = 1, ..., N.
В коэффициентах термопроводимости учитывается теплообмен кондукцией, конвекцией и излучением. Особенность применения алгоритма (1) в том, что в системе ВОГ или БИНС с системой терморегулирования имеются источники тепла (холода) с управляемыми мощностями (например, для ВОГ — это Q13, Q74) на спаях модуля Пельтье.
Нелинейная модель [11, 1] модуля Пельтье (для ВОГ) и принятый релейно-пропор-циональный закон управления температурой
073 = Q74 =
J =
J2R
sTJ(T73 + 273) + nm, sTJ (T74 + 273) + J2R
Jmax' если Тд - Tz > TL>
к(Тд - Tz - TN), если Tn < Tд - T < Tr
(2)
д *-z 0, если
Ti(t) q T2(t)
q*
T = const
-Tn < Tд - Tz < TN,
(3)
Рис. 2
k(T: - Tz + TN), если -TL < Tд - Tz < -TN, -Jmax, если TK - Tz <-TL,
где: sT — коэффициент термоэлектродвижущей силы; J — ток; R — электрическое сопротивление; n, m — количество термоэлементов в модуле Пельтье и количество модулей; Jmax — максимальный ток; TL, TN — зоны линейности и нечувствительности; T73, T74 — температуры рабочего и наружного спаев для ВОГ; к = Jmax/( TL — TN) — крутизна характеристики; TZ — заданная температура; ТД — температура термодатчика.
В (2) первые слагаемые определяют хладопроизводство (тепловыделение) Пельтье, вторые слагаемые — тепловыделение Джоуля.
Законы изменения температуры окружающей среды и основания:
TC = TCN = TCV = Tosn = TD sin Ш + T00 + Tr ,
(4)
где TD, ю, T00, TR — параметры детерминированных и случайных характеристик закона изменения температуры окружающей среды и основания.
Рассмотрим основные свойства и особенности предложенной системы терморегулирования.
1. Как определить температуру внутренней среды Тсу при работе системы? Пусть осуществляется теплообмен между воздушной массой внутренней среды с изменяющейся температурой TCV = T1(t), внутренними элементами ВОГ с температурой T2(t) и поверхностными элементами, в которых поддерживается заданная температура TZ = const.
Эта модель для тепловой системы из двух объемов с возможным во втором объеме источником тепла Q = const показана на рис. 2.
Система обыкновенных дифференциальных уравнений для этой модели, полученная методом тепловых балансов, имеет вид
cT + q(Ti - T2) + qiz(T - Tz) = 0, c2T2 + q(T2 - Ti) + q2zT2 - Tz) = Q,
(5)
где с1 — теплоемкость воздушной массы внутренней среды; с2 — теплоемкость внутренних элементов ВОГ; д, q1z, д2г — термопроводимости.
Примем, что с1 ^ с2; д « д1г ^ д2г и отражают реальную ситуацию. Общее решение системы уравнений (5)
T = D exp(X1t) + D2 exp(X2t) + Tz + Q-
q
qqiz + qqiz + q^z
T2 = ci(( exp(X1t) + D2X2 exp(X2t)) + q + qiz (( exp(X1t) + D2 exp(X2t)) ■
q q
+ tz + Q-
q
1+qqz
(6)
(7)
qqiz + qq2z + qizq2z v q
где D1, D2 — постоянные, определяемые из начальных условий.
Корни квадратного характеристического уравнения для системы (5)
Х12 = _ Г <9±9к + Щъ) ±1( ЦЪ _ 9192- V + ^. (8)
Эти корни — действительные, отрицательные и различные. Следовательно, система устойчива и в установившемся режиме при t ^ да, получим
Тег = 71(ю) = П + е-2-, (9)
9911 + 992; + 9ц92г
Т2(ю) = Тг + е-2-11 + ^ (10)
9911 + 9921 + 9ц92г I 9 У
При г ^ да температура внутренней среды принимает зн
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.