УДК 681.7.077.3/.4.621.396.664
МИКРОПРОЦЕССОРНАЯ СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ КООРДИНАТНЫХ СТОЛОВ С АБСОЛЮТНЫМ ОТСЧЕТОМ
А. В. Козичев
Предложена микропроцессорная оптоэлектронная система с абсолютным отсчетом для контроля положения координатных столов станочного оборудования, лабораторных стендов и т. п. Расширенные функциональные возможности устройства в сравнении с обычными растровыми датчиками перемещения обеспечиваются абсолютным характером измерения координат.
Координатные столы, применяемые в принтерах, плоттерах, сканерах и другом промышленном оборудовании, обычно оснащаются растровыми датчиками перемещения. Недостаток растровых датчиков состоит в относительном характере измерений.
Предлагаемая микропроцессорная система контроля линейных перемещений имеет абсолютный отсчет и обладает следующими отличительными особенностями:
— оптическим бесконтактным методом измерений с помощью линейной цифровой видеокамеры;
— практически неограниченным диапазоном контролируемых перемещений (десятки метров), определяемым анализатором из отдельных металлических пластин фиксированной длины (150...300 мм) в количестве, соответствующем длине измерений; погрешности сборки компенсируются при настройке за счет записи в ПЗУ набора констант с последующей автоматической коррекцией измерений при обработке данных микропроцессором в процессе работы в реальном времени;
— возможностью изготовления составной измерительной линейки из любого металлического листового материала на программно-управляемых эрозионных станках без предварительной подготовки поверхности заготовок;
— возможностью работы системы как в автономном режиме, так и под управлением микро-ЭВМ;
— возможностью модификации перепрограммируемого микропроцессорного устройства с индикацией (без изменения конструкции и переустановки) для выполнения дополнительных сервисных функций, например, измерения динамических параметров (скорости, ускорения), установки "закладок", преобразования абсолютных отсчетов в относительные и обратно, записи и хранения отсчетов и т. п.;
— получением абсолютной измеряемой величины, что позволяет выполнять работу неограниченное время и, соответственно, неограниченной
сложности (при сбоях и выключении питания данные измерений не теряются в отличие от обычных растровых датчиков перемещений), причем ошибка не накапливается в зависимости от диапазона, количества измерений и при инверсиях;
— практически не ограниченной износоустойчивостью системы благодаря отсутствию непосредственного механического контакта между движущейся и неподвижной частями системы;
— простотой сборки, настройки и калибровки системы с использованием записи в ПЗУ набора констант, корректирующих погрешности при автоматической обработке данных микропроцессором в процессе работы;
— простотой технического обслуживания системы благодаря самоконтролю загрязненных участков анализатора микропроцессорным блоком.
УСТРОЙСТВО СИСТЕМЫ КОНТРОЛЯ
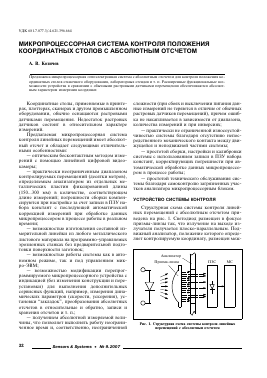
Структурная схема системы контроля линейных перемещений с абсолютным отсчетом приведена на рис. 1. Светодиод размещен в фокусе призмы-линзы так, что излучение на выходе излучателя получается плоско-параллельным. Подвижный анализатор, положение которого определяет контролируемую координату, размещен меж-
Рис. 1. Структурная схема системы контроля линейных перемещений с абсолютным отсчетом
Сигнал с ПЗС
Точный отсчет (мкм)
ДМ
Апертура ПЗС
Х
Рис. 2. Кодированный сигнал
ду излучателем и координатно-чувствительным фотоприемником (линейной ПЗС-матрицей).
Анализатор состоит из нескольких сегментов, собранных на едином основании, в количестве, определяемом необходимым диапазоном измерений. Сегмент линейного анализатора представляет собой металлическую пластину со сквозными прорезями. Каждый элементарный кодовый участок анализатора содержит информацию точного отсчета, числа условных "сантиметров" и "дециметров" (рис. 2), т. е. информацию о положении этого участка на анализаторе. Элементарный кодовый участок соответствует апертуре ПЗС.
Толщина d пластин анализатора выбирается на 1—2 порядка больше ширины щелей ~ 0,15...0,25 мм так, чтобы устранить погрешности фокусировки светодиода и отфильтровать непараллельные участки излучения, обусловленные неточечным размером светоизлучающей площадки светодиода. Практически d = 3...5 мкм. Фотоприемник подключен к входу АЦП микропроцессора.
ПРИНЦИП ДЕЙСТВИЯ
Призма-линза формирует параллельный поток излучения в виде световой полосы, развернутой дважды на 90° во взаимно-перпендикулярных направлениях для уменьшения габаритов оптической схемы. Длина световой полосы соответствует линейной апертуре ПЗС.
ПЗС формирует пространственно-кодированный фотоэлектрический сигнал (см. рис. 2). Микропроцессор МС обрабатывает фотоэлектрический сигнал с применением сплайн-интерполяции и весовой амплитудной функции для получения числовых значений координат видеоизображений щелей анализатора. По взаимному расположению щелей в пределах апертуры ПЗС рассчитывается дискретный набор величин дециметров, сантиметров и точной добавки в микрометрах с получением абсолютного отсчета положения анализатора.
РАСЧЕТ КООРДИНАТ
Предварительно производится обработка видеосигнала с устранением случайного дребезга (случайных абсолютных скачков амплитуды соседних фотоячеек) экспоненциальной сплайн-интерполяцией по формуле:
i + n
Amp(i) = ^ Amp, -exp[—const-(/ — j)2]/^Ampy,
i - n
где i — номер усредняемого импульса (фотоячейки); const — число, выбираемое в соответствии с неравномерностью чувствительности ПЗС; Amp(i) — амплитуда i-го пиксела. Таким образом вычисляется нормированная экспоненциально взвешенная сумма соседних n-ячеек по j от (i — n) до (i + n), где n — число соседних ячеек (пикселов).
Затем определяются взвешенные координаты положения изображений щелей на ПЗС по набору амплитуд A фоточувствительных ячеек i с амплитудой, ограниченной заданным уровнем Lev по формуле:
X = A/Х4, (A < Lev),
i
где числовой коэффициент С — размер фоточувствительной ячейки ПЗС в микрометрах. Уровень Lev выбирается из условия максимума градиента распределения амплитуд видеоизображения и составляет примерно половину максимальной амплитуды. Это условие обеспечивает минимум погрешности из-за неравномерности чувствительности ПЗС.
После вычисления полученные десятичные значения координат индицируются на матричном ЖКИ-дисплее. При диапазоне измерений больше ~1000 мм устройство оснащается температурным датчиком на основе термоэлемента типа DS18S20 для вычисления поправки на тепловое линейное расширение, добавляемой к вычисленной координате.
После окончательной сборки производят считывание координатных "скачков" при переходе между соседними сегментами последовательно для всех пар сегментов, составляющих анализатор, используя эталонный датчик перемещений (например, от оптической скамьи ОСК-2). Тем самым устраняются погрешности сборки анализатора. Полученные константы "скачков" дозапи-сывают в определенной области ПЗУ микропроцессора в виде таблицы для последующей компенсации при работе окончательно настроенного устройства.
В зависимости от функционального назначения вычисляются дополнительные параметры: скорость перемещения, ускорение, время работы, форма траектории и т. п.
см
м
Датчики и Системы • № 9.2007 _ 33
Основные технические характеристики
Число одновременно измеряемых
координат, не менее............ 2
Диапазон измерений, мм........ 100...10 000
Максимальная среднеквадратичная
ошибка измерений*, мм......... 0,01
Максимальная отслеживаемая скорость*, мм/с.................. 50
Индикация................... Светодиодные зна-
косинтезирующие индикаторы или ЖКИ типа DV20200 (Data Vision)
* Ограничения вызваны простейшим вариантом комплектующей линейной ФПЗС К1200ЦЛ2 и могут быть существенно снижены при комплектации ЛФПЗС типа KLI 10203 Kodak либо ILX703a Sony
При дополнительной оснастке FLASH-па-мятью данные измерений могут записываться и накапливаться в памяти с последующим вводом в персональный компьютер для обработки (статистической, динамической и т. п.) и систематизации с получением твердой копии и документирования с последующей отработкой технологии по улучшению параметров контролируемых конструкций.
Андрей Викторович Козичев — инженер-конструктор 1 кат., руководитель группы лазерных систем ФГУП ПО "Севмашпредпри-ятие", г. Северодвинск.
E-mail: lbov@ntc.sevmash.ru □
УДК 681.586'97
МАГНИТОУПРУГИЙ ДАТЧИК СЛАБОГО МАГНИТНОГО ПОЛЯ
О. Л. Сокол-Кутыловский
Рассмотрены конструкция и принцип действия магнитоупругого датчика слабого магнитного поля, выполненного на основе ферромагнитного сердечника из аморфного сплава с компенсированной магнитострикцией.
Аморфные ферромагнитные сплавы (АФС), получаемые методом быстрой закалки из расплава, имеют ряд замечательных физических свойств, благодаря которым они выделяются из всего многообразия ферромагнитных материалов. Прежде всего, только в этих сплавах имеет место высокоэффективное статическое и динамическое магни-тоупругое взаимодействие и только в них наблюдается гигантский магнитоимпедансный эффект1. Все это делает такие АФС перспективными материалами для применения в различных типах датчиков и преобразователей. Ниже рассмотрен маг-нитоупругий датчик слабого магнитного поля с акустическим возбуждением на основе АФС с компенсированной продольной магнитострикцией.
Датчик содержит генератор возбуждения 1 с кварцевым резонатором О (рис. 1), сердечник И из аморфного ферромагнитного сплава с компенсированной продольной магнитострикцией, приемную катушку индуктивности 2, усилитель высокой частоты 3, фазовый детектор 4, усилитель постоянного тока 5 и катушку обратной связи (О.С.) по магнитному полю 6. Сердечник механически соединен с кварцевым резонатором генератора возбуждения.
Выбор АФС с компенсированной продольной магнитострикцией обусловлен тем, что сердечники из таких аморфных сплавов имеют малую коэрцитивную силу (0,5...2 А/м), позволяющую использовать их в датчиках слабого постоянного магнитного поля, например в датчиках магнитного поля Земли. Кроме того, высокая добротность механичес
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.