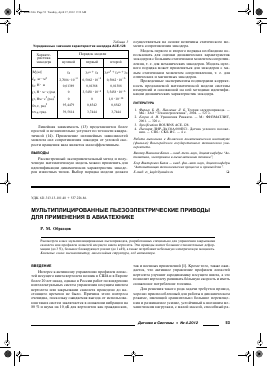
Таблица 3
Усредненные значения характеристик энкодера ACE-128
Характеристика энкодера Порядок модели
нулевой первый второй
|М»| X0 Xlffl + X0 X2®2 + Х1Ш + X0
/3, кг-м2 2,7086-10-6 0,5062-10-6 0,5062-10-6
Х0, H- м 0,01389 0,01388 0,01388
XI, H • м • с/рад 0 3,5458-10-6 3,5458-10-6
X2, Нм • с2/рад2 0 0 1,0 • 10-14
Sn,U, рад2 95,4479 0,8542 0,8542
anq граД. 39,5814 3,7444 3,7444
Линейная зависимость (13) представляется более простой и незначительно уступает по точности квадратичной (14). Применение нелинейных зависимостей момента сил сопротивления энкодера от угловой скорости вращения вала является малоэффективным.
ВЫВОДЫ
Рассмотренный экспериментальный метод и полученную математическую модель можно применять для идентификации динамических характеристик энкоде-ров известных типов. Выбор порядка модели должен
осуществляться на основе величины статического момента сопротивления энкодера.
Модель первого и второго порядка необходимо использовать для оценки динамических характеристик энкодеров с большим статическим моментом сопротивления, т. е. для механических энкодеров. Модель нулевого порядка может применяться для энкодеров с малым статическим моментом сопротивления, т. е. для оптических и магнитных энкодеров.
Проведенные эксперименты подтвердили корректность предлагаемой математической модели системы измерений и основанной на ней методики идентификации динамических характеристик энкодера.
ЛИТЕРАТУРА
1. Фираго Б. И., Павлячик Л. Б. Теория электропривода. — Мн.: ЗАО "Техноперспектива", 2004. — 527 с.
2. Егоров А. И. Уравнения Риккати. — М.: ФИЗМАТЛИТ, 2001. — 320 с.
3. Specifications BOURNS ACE-128.
4. Паспорт ЛИР-ДА136А.000ПС1. Датчик углового положения. — СПб.: СКБ ИС. — 4 с.
Работа выполнена в Волжском политехническом институте (филиале) Волгоградского государственного технического университета.
Виктор Иванович Капля — канд. техн. наук, доцент кафедры "Автоматика, электроника и вычислительная техника";
Егор Викторович Капля — канд. физ.-мат. наук, доцент кафедры "Автоматизация технологических процессов и производств".
E-mail: ev_kaple@yandex.ru □
УДК 621.313.13-181.48 + 537.226.86.
МУЛЬТИПЛИЦИРОВАННЫЕ ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ПРИВОДЫ ДЛЯ ПРИМЕНЕНИЯ В АВИАТЕХНИКЕ
Р. М. Образцов
Рассмотрен класс мультиплицированных пьезоприводов, разработанных специально для управления закрылками самолета или профилем лопастей несущего винта вертолета. Эти приводы имеют большие относительные деформации (до 3 %), большое блокирующее усилие (до 1 кН), а также потребляют небольшую электрическую мощность. Ключевые слова: пьезоактюатор, многослойная структура, ход актюатора.
ВВЕДЕНИЕ
Интерес к активному управлению профилем лопастей несущего винта вертолета возник в США и в Европе более 20 лет назад, однако в России работ по внедрению интеллектуальных систем управления несущим винтом вертолета или закрылками самолета проведено до настоящего времени не было. Причина этого интереса очевидна, поскольку ожидаемая выгода от использования таких систем заключается в снижении вибрации на 80 % и шума на 10 дБ для вертолетов как гражданских,
так и военных применений [1]. Кроме того, также ожидается, что активное управление профилем лопастей вертолета улучшит аэродинамику несущего винта, а это позволит вертолету развивать большую скорость и иметь сниженное потребление топлива.
Для решения такого рода задачи требуется привод, хорошо приспособленный для работы в динамическом режиме, имеющий сравнительно большие перемещения и развиваемое усилие, устойчивый к внешним механическим нагрузкам, с малой массой, способный ра-
ботать в широком диапазоне температур, а также отвечающий другим индивидуальным требованиям.
МНОГОСЛОЙНЫЕ ПЬЕЗОАКТЮАТОРЫ
Интеллектуальные пьезоприводы и многослойные пьезоструктуры завоевывают все больший интерес авиатехники для реализации новых функций или более эффективного выполнения тех операций, которые сейчас выполняются за счет пневмо- или электроприводов. Пьезоактюатор обладает высокой плотностью механической энергии (произведение перемещения и развиваемой силы, отнесенное к массе), высоким разрешением по перемещению, низким энергопотреблением, высоким быстродействием, устойчивостью к жестким условиям окружающей среды (таких, как вибрация, центробежные силы) [1]. Эти преимущества в сравнении с другими активными конструкциями, позволяют все чаще использовать такие актюаторы в различных приложениях в качестве интеллектуальных приводов, вносящих существенный вклад в развитие области интеллектуальных структур [2].
Такие многослойные пьезопакеты получены по технологии, аналогичной конденсаторной, которая появилась в 1988 г. Многослойные пьезоактюаторы обладают относительной деформацией удлинения примерно 0,1 %, пропорциональной управляющему электрическому напряжению (1 мкм на 1 мм высоты многослойной пьезоструктуры при управляющем напряжении 150 В). Так, например, многослойный пьезостолб (рис. 1) длиной 61 мм (что является вполне реалистичным размером для производства) и сечением 0,36 см2 [3] обладает свободным ходом порядка 65 мкм и блокирующим усилием около 2 кН. Из-за слишком малого собственного хода использование таких пьезоприводов не является оправданным для многих применений. Кроме того, известно, что прочность на растяжение этих приводов низка [1, 3]. Это обстоятельство может явиться причиной разрушения пьезоактюатора при деформациях изгиба, при воздействии внешней вибрации и при динамической нагрузке, где встречаются высокие механические напряжения как на сжатие, так и на растяжение.
Поэтому, несмотря на высокую плотность механической энергии, многослойные пьезоактюаторы не подходят в чистом виде для выполнения имеющихся задач в составе авиатехники. Для преодоления указанных ограничений необходим механизм с увеличенным ходом актюатора и с большей устойчивостью к механическим воздействиям внешней конструкции.
Рис. 1. Многослойные пьезоактюаторы производства ОАО "НИИ "Элпа"
МУЛЬТИПЛИЦИРОВАННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД
Мультиплицированный пьезоэлектрический привод, так называемый МПП, может использоваться в гораздо большем числе приложений, в том числе и авиатехнике. Первоначально эти приводы были разработаны для позиционирования оптических систем, но впоследствии они получили применение и в других областях техники. Такая конструкция привода увеличивает диапазон перемещений до 1 мм (при блокирующем усилии до 1 кН), потребляя при этом малую электрическую мощность. Конструкция мультипликатора выполняется из прочного материала и разрабатывается таким образом, что она выдерживает большие внешние воздействия, в том числе изгибные или на растяжение. В результате мультипликаторы успешно прошли все испытания, такие, например, как внешняя вибрация и действие центробежных сил.
Прежде всего, чтобы предотвратить растяжение пьезоактюатора до предельных механических напряжений, можно использовать известное решение, заключающееся в организации предварительного механического напряжения сжатия на многослойном пьезостолбе. Это решение также позволяет убрать возможные люфты в сопрягаемых узлах и, следовательно, предварительное армирование улучшит передачу перемещения рабочим механизмам [4].
Также такого рода армирование позволяет обеспечить защиту пьезостолба от механических повреждений, поскольку актюатор инкапсулирован в некоторую армирующую оболочку (как правило, металлическую), что является эффективным и недорогим решением для осуществления предварительного механического напряжения актюатора. В такого рода приводах актюатор вставляется в конструкцию предварительного напряжения для обеспечения оптимального его механического поджатия, которое в то же время позволяет совершать актюатору требуемые перемещения. Эта оболочка действует как пружина, работающая на сжатие в пределах упругих деформаций.
Такое предварительное напряжение многослойного пьезостержня составляет всего 5 % от жесткости самого привода, а это означает, что около 95 % усилия актюа-тора используется для получения полезного хода привода. Поскольку эти приводы не массивные и не имеют трущихся частей, они могут эффективно работать в динамическом режиме. Эта технология армирования в большой мере используется и в мультиплицированных пьезоприводах, о которых речь пойдет ниже. Однако этот тип пьезоактюаторов по-прежнему обладает ограниченным перемещением (как правило, до 60 мкм) и относительной деформации порядка 0,1 %, что не позволяет существенно расширить область использования таких приводов в сравнении с обычными неармиро-ванными.
Для преодоления ограничения перемещения и, следовательно, относительной деформации актюатора, были разработаны механические мультипликаторы для пьезоэлектрических приводов также с использованием предварительного армирования, имеющих достаточную надежность и хорошую электромеханическую эффек-
54 _ Sensors & Systems • № 4.2012
Рис. 2. Схематическое изображение и макет МПП с L-L-мультипликатором
тивность. Действительно, за последнее время было разработано несколько типов систем рычагов, позволяющих добиться увеличения свободного перемещения. Такие приводы уже предоставляют большее перемещение, чем сами актюаторы, но, естественно, за счет снижения величины блокирующего усилия и надежности. Также вместо актюаторов пакетного типа могут использоваться изгибные приводы, например биморфного типа. Хотя они и обладают относительно высокими деформациями, но слишком хрупки и имеют очень ограниченные блокирующие усилия.
Конечно, можно многослойные пьезоприводы объединить с механизмом усиления, например гидравлическим, но это приведет к получению громоздких темпера-турно-зависимых устройств. Механическая мультипликация более проста, а конструкции для ее осуществления разнообразней. Одним из путей решения задачи увеличения свободного перемещения может служить конструкция мультипликатора с хорошо подогнанными шарнирами для создания системы рычагов. Однако такие способы соединения движущихся частей мультипликатора являются источником потерь собственных перемещений актюатора из-за люфтов или даже разрушения всей конструкции в
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.