горитма сигнальной адаптации. Для этого в систему вводится сигнал ыа^(?), который суммируется с сигналом линейного регулятора ы0(?), в результате получаем сигнал на входе объекта управления: ы(1) = Ыд(?) + Ыа^(?).
При таком подходе формирования адаптивного управления для каждого канала управления требуется введение отдельного адаптивного элемента.
Архитектура адаптивного управления с использованием обратного преобразования при применении метода ЛОС представлена на рис. 3.
При применении нечеткого вывода (фаззи-контроллера) для формирования в (4) адаптивного управления сигнал ыа^(?) будет описываться уравнением (2).
ЗАКЛЮЧЕНИЕ
Для компенсации ошибок обратного преобразования при применении ЛОС в систему вводится адаптивный элемент, в качестве которого может
быть использована система нечеткого логического вывода. В реальных условиях для устранения неопределенностей может быть успешно использован фаззиконтроллер в системах управления с обратной связью.
ЛИТЕРАТУРА
1. Ким Д. П. Теория автоматического управления. Т. 2. Многомерные, нелинейные, оптимальные и адаптивные системы: Учеб. пособие. — М.: Физматлит, 2004. — 464 с.
2. Wang L.-X., Mendel J. M. Fuzzy basis functions, universal approximation, and orthogonal least-squares learning // IEEE Trans Neural Netw 3:807-81.
3. Круглое В. В., Дли М. И., Годунов Р. Ю. Нечеткая логика и искусственные нейронные сети. — М.: Физматлит, 2001. — 221 с.
Евгений Владимирович Матвеев — ст. преподаватель кафедры "Радиотехника" СФУ;
® (391) 291-22-79
E-mail: matjon@rambler.ru
Вячеслав Александрович Глинчиков — канд. техн. наук, доцент кафедры "Радиотехника" СФУ.
® (391) 291-22-79 □
УДК 621. 311. 21
О ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УРОВНЯ ВОДЫ В ГИДРОНИВЕЛИРАХ ГЭС
А. М. Волошин, Г. Я. Шайдуров
Описаны физические основы, методы оценки основных факторов, влияющих на погрешность гидростатических нивелиров, и практические рекомендации по созданию систем автоматизированного контроля высотных смещений (САК ВС) на примере плотины Саяно-Шушенской ГЭС.
Ключевые слова: измерения, датчик уровня, погрешности, гидростатические нивелиры, системы мониторинга, гидротехнические сооружения.
Гидростатические нивелиры являются, пожалуй, одними из первых точных геодезических приборов, которые научился применять человек. И тем не менее, сам метод гидростатического нивелирования до сих пор широко используется в самых различных областях науки и техники. Чаще всего он применяется в ускорителях элементарных частиц для прецизионного позиционирования отклоняющих систем, в геофизике для измерения углов наклона земной
поверхности, а также при строительстве фундаментов и монтаже крупногабаритного оборудования, мониторинге состояния гидротехнических сооружений (ГТС) и т. д. Причем с каждым годом требования к точности измерения высотных перемещений непрерывно растут, особенно эта тенденция наблюдается в системах мониторинга за состоянием ГТС.
В статьях по диагностике высоких плотин и организации систем наблюдений за ними [1, 2]
указывается на необходимость измерения высотных смещений с точностью до десятков и даже единиц микрон. Зачастую гидростатические нивелиры невозможно полноценно заменить классическими геодезическими приборами и ручными замерами. Помимо требуемой высокой точности, труднодоступности помещений в плотине для применения оптических приборов требуется еще и высокая оперативность замеров, особенно в период паводкового наполнения
водохранилища и во время ремонтных работ в плотине, что фактически невозможно без автоматизации измерений. Учитывая то, что государство в законодательном порядке обязывает собственника гидротехнических сооружений и эксплуатирующую организацию принимать все меры для обеспечения безопасной эксплуатации ГТС, вопрос совершенствования методов и средств мониторинга состояния сооружений выходит на первый план.
ОАО "РусГидро" в 2010 г. приступило к реконструкции системы оперативного контроля состояния плотины Саяно-Шу-шенской ГЭС, в которую будет входить система автоматизированного контроля высотных смещений (САК ВС) плотины. Хотя в литературе тема гидростатического нивелирования достаточно полно освещена [3, 4], до настоящего времени в России пока не существует систем САК ВС плотин, несмотря на их безусловную необходимость. Цель данной статьи — описание физических основ стационарных гидростатических нивелиров, методов учета основных факторов, влияющих на погрешность измерения разности уровней жидкости в гидронивелирах, и выработка практических рекомендаций по созданию САК ВС применительно к плотине Сая-но-Шушенской ГЭС.
Датчиками наиболее ценных диагностических показателей состояния плотины и, соответственно, требующих высокой точности измерений, являются поперечные гидростатические нивелиры. Они представляют собой сосуды с жидкостью в виде горизонтально расположенных длинных труб диаметром 100 мм и длиной 15...60 м на 2/3 заполненных водой (рис. 1).
На любую частицу жидкости в общем объеме действуют два вида сил: поверхностные и массовые. Поверхностные силы действуют только на поверх-
Рис. 1. Схематический разрез гидронивелира
ность выделенного объема и складываются из сил, направленных по нормали к элементу поверхности и касательных к ней, причем в покоящейся жидкости поверхностные силы обычно направлены по нормали к элементу поверхности, а в движущейся вязкой жидкости присутствуют и нормальная составляющая, и касательная, которая определяет силы трения.
Массовые, или объемные силы, действуют на каждую частицу жидкости пропорционально массе выделенного объема, к ним относится, в частности, сила тяжести. Рассмотрим жидкость, находящуюся в состоянии покоя относительно некоторой инер-циальной системы координат х, у, г, на каждый элемент которой действует равнодействующая массовых сил с плотностью распределения (отношением величины массовой силы к массе и имеющей размерность ускорения) И. Ее проекции на оси координат обозначим как ¥х, ¥у и ¥,.. В гидростатике [5] для этого случая состояние равновесия
жидкости описывается системой уравнений Эйлера:
йР = р¥
йх р'х
йр йу
РРУ
(1)
йР = рИ йг
где р — плотность жидкости, р — давление.
Умножим уравнения (1) соответственно на йх, йу и йг и суммируем его члены:
йрйх + йрйу + йрйг =
йх йу йг
= рИх йх + рИу йу + рИг йг. (2)
В уравнении (2) в левой части полный дифференциал функции р = /(х,у,г), запишем его в виде:
йр = рИуйх + рИуйу + рИ^йг. (3)
Поскольку гидронивелир является сосудом с жидкостью, неподвижной относительно Земли и основной массовой силой является только сила тяжести, то в выражении (3) можно принять И = g. Если направить ось
Марка 2
Марка 3
(Г H N
¡lpR3hmsx.
DTi
h ■ h3 _ hmm 3 P = P3fih3
_ _ 1
AH„,
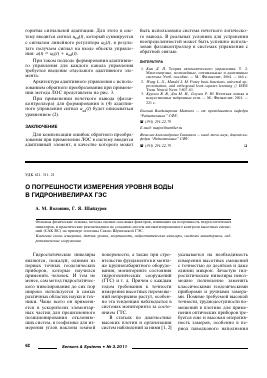
Рис. 2. Схема измерительной головки гидронивелира
Ог вертикально вниз (т. е. совместить с направлением вектора И), то получим ¥х = 0; ¥у = 0, ¥г = 0.
После подстановки в (3) получим
ар = р^^г = (4)
Интегрируя выражение (4) с учетом того, что в пределах рассматриваемого объема ускорение свободного падения g и плотность не меняются по высоте, получим: р = рgz + С, в котором при г = 0 (уровень поверхности жидкости) величина С равна внешнему давлению р0. Переходя к более привычным обозначениям высоты к, можно записать р = р0 + рgk.
Гидростатический нивелир является фактически системой сообщающихся сосудов, в которых жидкость перераспределяется в системе до тех пор пока не наступит состояние гидростатического равновесия столбов жидкости р0[ + р^к! = ро2 + + Р2?2к2, где соответственно: ро1 , Р1, gl, к: — внешнее давление, плотность жидкости, ускорение свободного падения и высота столба жидкости для первой марки гидронивелира (базо-
+
Р2 S2 Ро, - Ро2 P2g2 '
(5)
жидкости. Линия пересечения мениска с твердым телом является периметром смачивания, а угол между смоченной поверхностью твердого тела и мениском в точке пересечения и (краевой угол) характеризует степень смачиваемости. По закону Лапласа [6] при средней кривизне поверхности жидкости
1
H =
2 (1/ R + 1/R2
вой); а ро2, р2, g2, к2 — внешнее давление, плотность жидкости, ускорение свободного падения и высота столба жидкости для марки гидронивелира, в которой производится замер. Если выразить к2 через к: и Ак получим:
ро1 + Р1?1к1 =
= ро2 + Р2?2(к1 + Ак)
(Р1 gl - Р2g2), , или Ак = —1—1-к1 +
Эта формула описывает зависимость разности уровней в двух точках (марках) гидронивелира от разности в них внешнего давления, плотности жидкости и ускорения свободного падения, а также от высоты столба жидкости в точке отсчета.
Помимо этого необходимо также учитывать влияние сил поверхностного натяжения, которые тоже влияют на разность уровней в гидронивелире. На границе соприкосновения жидкости, газа и твердого тела наблюдается явление, называемое смачиванием — появление мениска свободной поверхности
где Ri и R2 — главные радиусы кривизны. Давление под искривленной поверхностью жидкости равно p = po + Pr, где ро — давление при плоской поверхности, а Pr = a(1/Ri + I/R2) — дополнительное давление, пропорциональное поверхностному натяжению а данной жидкости.
В случае использования в гидронивелирах цилиндрических измерительных головок имеет место превышение или понижение уровня (смачивающей или несмачивающей) жидкости в сравнении со свободной поверхностью, зависящее от радиуса цилиндрической измерительной головки (рис. 2) по формуле Жюрена [6]: hn = 2acos9/rpg, где r — радиус сосуда, а — поверхностное натяжение жидкости, р — плотность жидкости, 9 — краевой угол, g — ускорение свободного падения. Для случая, когда измерительная головка имеет форму узкой щели, или находится непосредственно в трубе гидронивелира, высота превышения или понижения уровня рассчитывается по формуле
2 а cos 9
hn =
(6)
где а — ширина щели (расстояние между стенками трубы на уровне жидкости). В случае для двух точек (марок) гидронивелира существует разность уровней жидкости, обусловленная различием сил на периметре смачивания, связанных с геометрическими размерами, свой-
ствами и чистотой использованных в системе материалов.
В общем случае, с учетом (5) и (
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.