ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА
Том 77. Вып. 2, 2013
УДК 531.38
© 2013 г. Н. И. Амелькин
О ПОЛОЖЕНИЯХ РАВНОВЕСИЯ СПУТНИКА, НЕСУЩЕГО ТРЕХСТЕПЕННЫЕ СИЛОВЫЕ ГИРОСКОПЫ, В ЦЕНТРАЛЬНОМ ГРАВИТАЦИОННОМ ПОЛЕ
Для спутника, несущего произвольное число трехстепенных силовых гироскопов, определено все множество положений равновесия в центральном гравитационном поле на круговой орбите и проведен детальный анализ их вековой устойчивости. Исследованы асимптотические свойства движений спутника при наличии диссипации в осях рамок гироскопов.
Ранее [1—3] исследовались положения равновесия спутника с двухстепенным силовым гироскопом на круговой орбите. Аналогичная задача решалась для спутника с трехстепенным гироскопом в кардановом подвесе [4], причем рассматривался случай, когда система "корпус спутника — гироскоп" не обладает свойством гиростата, но предполагалось, что ось внешней рамки гироскопа параллельна одной из главных центральных осей инерции корпуса спутника.
Ниже исследуются положения равновесия спутника с произвольным числом трехстепенных силовых гироскопов, установленных произвольным образом в несущем теле, в предположении, что система "несущее тело — гироскопы" обладает свойством гиростата.
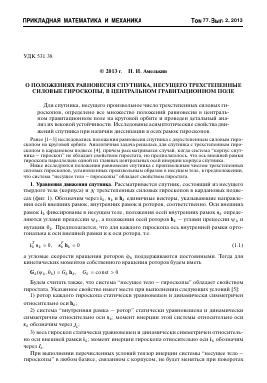
1. Уравнения движения спутника. Рассматривается спутник, состоящий из несущего твердого тела (корпуса) и N трехстепенных силовых гироскопов в кардановых подвесах (фиг. 1). Обозначим через iк, sк и hк единичные векторы, указывающие направления осей внешних рамок, внутренних рамок и роторов, соответственно. Оси внешних рамок iк фиксированы в несущем теле, положения осей внутренних рамок sк определяются углами прецессии у к, а положения осей роторов hк — углами прецессии у к и нутации 9 к. Предполагается, что для каждого гироскопа ось внутренней рамки ортогональна к оси внешней рамки и к оси ротора, т.е.
iTk sк = 0, s[ hk = 0 (1.1)
а угловые скорости вращения роторов фк поддерживаются постоянными. Тогда для кинетических моментов собственного вращения роторов будем иметь
Gк(Vк, бк) = ^к hк, Ок = const > 0
Будем считать также, что система "несущее тело — гироскопы" обладает свойством гиростата. Указанное свойство имеет место при выполнении следующих условий [5]:
1) ротор каждого гироскопа статически уравновешен и динамически симметричен относительно оси h к;
2) система "внутренняя рамка — ротор" статически уравновешена и динамически симметрична относительно оси s к; момент инерции этой системы относительно оси s к обозначим через Jk;
3) весь гироскоп статически уравновешен и динамически симметричен относительно оси внешней рамки i к; момент инерции гироскопа относительно оси i к обозначим через Ik.
При выполнении перечисленных условий тензор инерции системы "несущее тело — гироскопы" в любом базисе, связанном с корпусом, не будет меняться при поворотах
Фиг. 1
рамок гироскопов, т.е. система будет гиростатом. Этот тензор, вычисленный в базисе главных центральных осей инерции спутника е1, е 2, е 3, будем обозначать через J, а соответствующие главные моменты инерции — через А, В, С.
Анализ движений спутника проводится в рамках ограниченной круговой задачи, т.е. в предположении, что центр масс спутника движется по кеплеровой круговой орбите. Орбитальный базис определяется взаимно ортогональными единичными векторами г, п и т = п х г, направленными по радиусу орбиты, по нормали к плоскости орбиты и по касательной к орбите, соответственно. Угловая скорость орбитального базиса ю0 = ю0п постоянна в инерциальном базисе.
Уравнения движения спутника можно получить из теоремы об изменении кинетического момента, применяя ее для всей системы и для отдельных элементов. Ранее [5] были получены уравнения движения в однородном внешнем поле (при отсутствии внешних моментов сил). Для рассматриваемого случая центрального гравитационного поля эти уравнения принимают вид
N
I со + и X (I и + О) + £ [4 у к I к + 1к (ё к * к + V к 0* 1 к х 8 к) +
к=1
+ V к 1 к X (О к - 1к и) + ё к * к X (О к - 1к и)] = 3ю0 г X 1г (1.2)
1к (вкк ю + ё к) к (* к х 1 к )Т (О к - 4®) + (ю х О к) = М2к; к = 1,2,..., N (1.3)
1к(\к ю +¥к) - 0 к (* к х 1к)Т(Ок - 4®) + 1*(ю х Ок) = М1к; к = 1,2,..., N (1.4)
Здесь ю — вектор абсолютной угловой скорости корпуса спутника, С — суммарный кинетический момент роторов гироскопов.
Записанные уравнения отличаются от уравнений движения в однородном поле [5] только наличием действующего на спутник гравитационного момента в правой части равенства (1.2). При оговоренных выше условиях 1—3 силы центрального поля не создают моментов относительно осей 1 к и 8к. Поэтому Мх к и М2 к — моменты внутренних сил в осях прецессии 1 к и нутации 8к, соответственно. Для пассивных гироскопов эти моменты могут быть обусловлены наличием пружин и демпферов в осях рамок.
Из уравнений (1.2)—(1.4) можно получить уравнения, описывающие движения спутника относительно орбитального базиса, если выразить абсолютную угловую скорость и абсолютное угловое ускорение спутника формулами
ю = ю0 + Г, со = ю0 х Г + Г (1.5)
Здесь ^ и Г — угловая скорость и угловое ускорение спутника относительно орбитального базиса. В уравнениях (1.2)—(1.4) векторы г и п задаются в базисе, связанном с корпусом спутника. Поэтому для получения замкнутой системы к этим уравнениям следует добавить кинематические уравнения Пуассона.
2. Положения равновесия. Далее рассматривается спутник с пассивными силовыми гироскопами, т.е. предполагается, что в осях рамок гироскопов могут действовать только моменты потенциальных и диссипативных сил.
Уравнения, определяющие положения относительного равновесия спутника, можно получить их уравнений (1.2)—(1.4), положив
где П — энергия действующих в осях рамок потенциальных сил. Эти же положения равновесия соответствуют стационарным точкам измененной потенциальной энергии [1]
N
Через Нк = вк/ю0 обозначены "приведенные" кинетические моменты роторов с размерностью момента инерции.
Далее будем полагать, что в осях рамок гироскопов могут действовать только моменты диссипативных сил, т.е. П = 0. Поскольку векторы п и г единичны и взаимно ортогональны, то стационарные точки функции (2.1) соответствуют стационарным точкам функции Лагранжа с множителями
п ^ 0, VI/к - 0, 9к - 0, Мхк =-дП/дук, М
2к -
ди/де к
(2.1)
(2.2)
Учитывая равенства
дНдук = 1 к х Нк, дН/59к = 8к х Нк, д 8к/дук = 1 к х 8к
(2.3)
получим для положений равновесия следующую систему уравнений:
дЬ/дп = -I п - Н + + Х3г = 0 дЬ/ д г = 31 г + X 2г + Х3п = 0
дЬ/дук = п Т(1 к * Нк) = 0; k = 1, ..., N
(2.4)
(2.5)
(2.6)
дЬ/дек = п т(8к * Нк) = 0; k = 1, ..., N
(2.7)
Уравнения (2.6), (2.7) описывают условия равновесия гироскопов относительно корпуса спутника, а уравнения (2.4), (2.5) эквивалентны одному уравнению
п X (I п + Н) = 3 г X 1г (2.8)
которое описывает условие равновесия относительно орбитального базиса спутника с ротором, имеющим приведенный кинетический момент Н.
Из уравнений (2.6), (2.7) следует, что в положениях равновесия каждый вектор Нк должен удовлетворять одному из условий
Нк х 1 к = 0 (2.9)
п х Нк = 0 (2.10)
Действительно, условие (2.9) не противоречит уравнениям (2.6)—(2.8). Если же предполо-
Т
жить, что 1 к х Нк Ф 0, то из уравнения (2.6) при учете условий (1.1) будем иметь п вк = 0. Поскольку в силу уравнения (2.7) вектор п лежит в плоскости взаимно ортогональных векторов sk и т
Нь то из равенства п вк = 0 следует, что вектор п параллелен вектору Нь т.е. выполняется условие (2.10).
Отметим, что при выполнении условий (2.9) рамки соответствующих гироскопов "сложены", т.е. внутренняя рамка параллельна внешней.
Определим положения равновесия, для которых все векторы Нк удовлетворяют условию (2.10). В этом случае уравнение (2.8) принимает вид
п х 1п = 3 г х 1г
Оно описывает положения относительного равновесия твердого тела на круговой орбите и имеет 24 различных решения {п, г}, для каждого из которых главные оси инерции тела параллельны осям орбитального базиса. Все соответствующие рассматриваемому случаю положения равновесия системы "несущее тело — гироскопы" описываются формулами
п = ±е,, г = ±е у, I * у = 1,2,3; Нк = ЪкНкш, 5к = ±1, к = 1,...,N (2.11)
Здесь и далее для записи многозначных решений используются символы 5к, каждый из которых может принимать два значения: +1 и —1.
Исследуем решения, для которых хотя бы один из векторов Ну- удовлетворяет условию (2.9). Пусть для определенности
Ну = 5уНу1у, у = 1,...,т, т > 1; Нк = 5к#кп, к = т +1,...,N (.12)
Из уравнения (2.8) получим уравнение
т
п X (I п + Н*) = 3 г X I г; Н* = £ ЬуНу ^ (2.13)
у=1
описывающее положения равновесия спутника с ротором, имеющим фиксированный кинетический момент Н*.
Известно [6, 7], что в зависимости от величины вектора Н* и его направления в базисе главных осей инерции спутника уравнение (2.13) имеет от 8 до 24 решений {п, г}, определяющих ориентацию корпуса спутника относительно орбитального базиса. После определения этих решений на основании уравнений (2.7) определяются значения углов прецессии (положения осей 8у) для первых т гироскопов, а на основании условий (2.10) и уравнений (2.6), (2.7) находятся углы прецессии и нутации для остальных гироскопов.
Число различных значений вектора Н* равно
S = N! У-2-
к 1 к- к)!
а число различных ориентаций спутника {п, г}, определяемых из уравнений (2.13), может составлять от 8^* до 24S.
3. Анализ вековой устойчивости. Положение равновесия спутника будет устойчивым в вековом смысле (удовлетворять достаточным условиям устойчивости), если в рассматриваемой точке функция (2.1) имеет строгий минимум, и неустойчивым в вековом смысле при отсутствии минимума. Характер вековой устойчивости определяется на основе анализа значений второго дифференциала функции (2.2) на множестве
пТ й п = 0, гТ й г = 0, пТ й г = 0
Второй дифференциал функции (2.2) описывается выражением ф = й2Ь = 3 йгТI йг - йпТI йп + Х1(йп)2 + ^2(ёг)2 + 2МпТёг -
(3.1)
- 2йп
N
Е (1 к х Н )йук + (8к X Нк )йвк
к=1
N
- п~ Е1 к X (1 к X Нк)йу2 + 8к X (8к X Нк)йв2к + 21 к X (8к X Нк)й^¡й9к .к=1
На основании равенств (3.1) вариации векторов орбитальн
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.