ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 1, 2013
УДК 517.947.44
© 2013 г. Тушев О.Н., Березовский А.В.
ОПРЕДЕЛЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК НЕЛИНЕЙНОЙ МОДЕЛИ КОНСТРУКЦИИ1
Рассматривается стохастическая задача динамики нелинейной модели конструкции. Задача решается с использованием разложения решения по усеченному ортогональному базису собственных векторов линейной модели. Считается, что нелинейности, присутствующие в системе, не приводят к принципиальному изменению в ее динамическом поведении, а вносят только существенную количественную поправку по отношению к линейной модели. Нелинейные характеристики статистически линеаризуются. Коэффициенты статистической линеаризации формально трактуются, как некоторые вариации соответствующих элементов матрицы жесткости линейной модели. Спектральные плотности, дисперсии перемещений линеаризованной системы, а также ее собственные числа и векторы представляются в виде степенных рядов по указанным вариациям с учетом линейного или квадратическо-го приближений. Для определения коэффициентов в разложении привлекается аппарат теории чувствительности. Это дает возможность сформировать систему трансцендентных алгебраических уравнений относительно дисперсий перемещений, которая решается методом последовательных приближений. Затем определяются все искомые спектральные плотности. Результаты иллюстрируются примерами.
При решении различных задач динамики конструкций на основе линейных конечно-элементных моделей большой размерности весьма распространенным подходом является разложение решения по главным координатам на основе ортогонального базиса собственных векторов. Чаще всего этот путь является наиболее рациональным, поскольку обычно для достижения необходимой точности удается ограничиться небольшим количеством членов разложения. Если в системе присутствуют нелинейные элементы, то, выделив линейную часть модели, на ее основе можно также использовать ортогональный базис. Известно, что дифференциальные уравнения относительно главных координат, оказываются связанными через правые части. Здесь так же, как и для линейной системы, в большинстве случаев удается ограничиться небольшим числом членов разложения, которое обеспечивает необходимую точность в ограниченном диапазоне частот, который, как правило, задается при решении конкретной инженерной задачи.
Для решения стохастических задач динамики конструкции, в особенности, если необходимо определить стационарное решение при стационарных случайных нагрузках, весьма эффективным является применение статистической линеаризации. Этот аппарат хорошо разработан и широко описан в литературе [1]. Принципиальных трудностей в формировании решения не возникает, если использовать в качестве математического описания динамики конечно-элементной модели систему дифференциальных уравнений в нормальной форме Коши и после статистической линеаризации
1 Работа выполнена при поддержке РФФИ № 11-08-00699.
Ф(у), ф(У)
-I
у у У
----- ----- 3 ../........ 2 ........V, у У
ч \ > у у /1
У у у \ ' \ ------ ------
...... у У
у у У
2 О
У к
2 с
—
В
-а о а
Рис. 1
........Ск
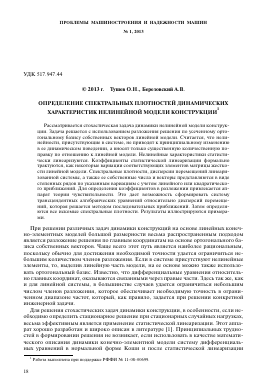
77777777777777777777- 5 / 5 6
Рис. 4
3
V А 0 X 1-*
2
Рис. 4. 1 — балочные элементы, 2 — сосредоточенные массы, 3 — элементы жесткости, 4 — нелинейность 1, 5 — нелинейность 2, 6 — стол вибростенда
применить один из известных подходов — метод моментов [1]. Для моделей с большим числом степеней свободы этот путь оказывается слишком громоздким и сложным в практической реализации. Применение ортогонального разложения здесь затруднено тем, что коэффициенты статистической линеаризации зависят от математических ожиданий и дисперсий решения. Таким образом, вычислить априори собственные числа и векторы линеаризованной системы невозможно в силу неизвестности части элементов матриц коэффициентов. Несложно убедиться, что разложение по главным координатам линейной части модели (без учета линеаризованного дополнения), как это делается для детерминированного варианта, приводит к серьезным трудностям вследствие зависимости уравнений относительно главных координат. Здесь предлагается подход, позволяющий избежать этих осложнений и достаточно просто получить спектральные плотности динамических характеристик нелинейной системы с использованием усеченного ортогонального базиса линейной модели конструкции. При этом рассматривается только класс задач, в котором учет нелинейностей по отношению к линейной модели не приводит к качественным изменениям в динамическом поведении конструкции, к таким, например, как потеря устойчивости или автоколебания. Влияние нелинейностей проявляется лишь в существенном изменении вероятностных характеристик фазовых координат модели, в частности их спектральных плотностей.
Представим каждую из нелинейностей у (у), входящих в уравнения движения, в виде суммы некоторой линейной части су и нелинейного дополнения ф(у)
У (У) = су + ф(у).
(1)
Такая операция обычно не вызывает каких-либо трудностей и может выполняться различными способами.
1. Нелинейная характеристика люфт представлена на рис. 1, где 1 — у(у), 2 — су, 3 - Ф(у):
У) =
с (у - d), у > с1,
0, У < d,
с (у + d), у < -d,
Ф(У) =
-cd, у > d,
-су, |у| < d,
cd, у < -d.
2. Использование линеаризации предложено в [2]. В этом случае коэффициент с
определяется из условия минимума средней квадратической ошибки аппроксима-
0
У
ции 8 на интервале (—а, а), где а — полуразмах колебаний (максимальная амплитуда перемещения у).
В частности для кососимметричной характеристики ошибка выражается следующим образом:
а
8 = | [у(у ) - су ] 2йу.
-а
Тогда из условия минимума ошибки имеем
а
= -3 [у (у) у ¿у.
п *
с=
а
о
Вследствие преобразований (1) векторное уравнение движения объекта можно записать в виде
МУ+ ВУ + СУ + Ф( У) = Г( г), (2)
где У = (у1, у2, ..., уп)т — вектор перемещений; М, В, С — симметричные, положительно определенные матрицы масс, жесткости и демпфирования; ДО = (/1(0,./2(0, .••,/П(0)т — вектор стационарных внешних воздействий с нулевым математическим ожиданием и заданной матрицей спектральных плотностей SI{m); Ф(У) = (ф1(У), ф2(У), ..., фп(У))т — нелинейная вектор-функция.
Следуя принятому для многих практических задач допущению, в уравнении (2) диссипативные силы, эффект действия которых может быть оценен лишь интегрально, условно задаются линейным членом В У. Матрица В выбирается обычно пропорциональной матрицам масс или жесткости. Заметим, что принципиально несложно
рассмотреть нелинейность общего вида Ф(У, У), тем более, что на практике она, как правило, сепарабельна.
Из допущения о характере нелинейности вытекает, что при Ф(У) = 0 система (2) не теряет физического смысла и является линейной моделью изучаемого объекта, качественно сохраняющей его основные свойства. Произведем статистическую линеаризацию нелинейности [1] с учетом того, что математическое ожидание внешнего воздействия, а значит и вектор коэффициентов по математическому ожиданию в линеаризованной зависимости равны нулю. Тогда
Ф( У) = р(Ку) У, (3)
где У0 — центрированная случайная вектор-функция времени с математическими ожиданиями составляющих равными нулю У0 = У — М(У); Ку — матрица корреляционных моментов вектора У0; Р(Ку) — матрица коэффициентов статистической линеаризации по центрированным составляющим.
Подстановка (3) в (2) дает следующее уравнение:
М^ + В+ [С + Р(Ку)] У = /(г). (4)
Для исключения приведенных в статье трудностей, связанных с использованием ортогональных разложений для линеаризованного уравнения, будем считать элементы матрицы Р(Ку) некоторыми пока неизвестными вариациями соответствующих элементов матрицы С (жесткостных параметров динамической модели). Таким образом,
рассматривается решение нелинейной задачи в окрестности решения линеинои модели. Представим элементы матрицы спектральных плотностей вектора У0 в форме разложений в степенные ряды по указанным вариациям, ограничившись линейным или квадратическим приближением. Элементы матрицы С, которые имеют эти вариации, обозначим с,, ] = 1, 2, ..., т, где т — количество варьируемых параметров (элементов матрицы С), в общем случае т = и2. Тогда можно записать
Б, ■(
т т
(ю) = Х/г(ю) + £рР(ю)Р,(Ху) + 1 £ ст.'^ю)Р,(Ху)Р.(Ху), V/, /',
(5)
, = 1
и. = 1
где Бп .(ю), Б//' (ю) — элементы матриц спектральных плотностей вектора У линеаризованной и линейной систем; Р,(КУ) — элементы матрицы Р(КУ);
~ 2~ р(//')(ю) //■ (ю) (//')(ю) д ~//'(ю) Р I (ю) = —-Г--, СТ. (ю) = - - -
д с
де^с.
— коэффициенты чувствительности Б/г (ю) по параметрам с, (элементам матрицы С).
На основании (5) аналогичное разложение получается для элементов матрицы корреляционных моментов Х1Г
тт
Х„. = Х/г + £ а(1ПР(Ху) + 1 £ рРР,(Ху)Р.(Ху), V/, /',
(6)
=1
и = 1
где
Х// =
= 18/Г (ю) йю, Х//. = | ^<ю) йю, а,(//> = |р//> (ю) йю,
-да -да —да
да
р. = ] ст. (ю)йю.
(7)
Совокупность соотношений (6), (7) при т = и2 представляет собой полную систему алгебраических трансцендентных уравнений относительно Ки., решение которой в общем случае сопряжено с определенными трудностями. Задача значительно упрощается, если учесть следующие обстоятельства, характерные для постановок реальных инженерных задач анализа динамики конструкций: практический интерес, обычно, представляют только дисперсии и спектральные плотности перемещений, скоростей и ускорений, т.е. диагональные элементы соответствующих матриц; количество нелинейных элементов т в расчетных моделях реальных конструкций относительно невелико (т < и2); нелинейные характеристики элементов конструкций, как правило, зависят от одного перемещения ф,(у,) или разности двух обычно соседних перемещений.
Тогда, если обозначить К, = В, в первом случае имеем Р ¡(Б ), а во втором —
аду - у, -1])
О [у, - у, -1 ]
+ Б{ -1 - 2 Х, , -1.
(8)
Как отмечается в [1] и подтверждается расчетами, пренебрежение взаимным корреляционным моментом в соотношении (8) не приводит к значительным ошибкам.
да
да
да
да
На основании изложенного системы уравнений (5) и (6) трансформируются к виду
m m
Sl(ю) =
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.