ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2012, № 6, с. 112-121
РОБОТОТЕХНИКА
УДК 62-50
ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ ДВИЖЕНИЕМ ДВУХМАССОВОЙ СИСТЕМЫ В СРЕДЕ С КУСОЧНО-ЛИНЕЙНЫМ СОПРОТИВЛЕНИЕМ*
© 2012 г. А. А. Подосинникова
Москва, МФТИ, ИПМех РАН Поступила в редакцию 19.03.12 г.
Рассматривается прямолинейное движение механической системы, состоящей из двух тел: корпуса и внутреннего тела. Корпус находится во внешней среде с сопротивлением, а внутреннее тело движется в полости корпуса, не взаимодействуя с внешней средой. Периодическое движение внутреннего тела относительно корпуса при определенных условиях приводит к перемещению системы как целого. Внешняя среда действует на корпус с силой, пропорциональной его скорости с коэффициентом сопротивления, зависящим от направления движения. Изучаются такие движения внутреннего тела, при которых его относительная скорость непрерывна. Строится и анализируется оптимальное периодическое движение внутреннего тела, при котором средняя за период скорость системы как целого максимальна.
Введение. В данной статье решается задача оптимального управления прямолинейным движением механической системы, которая состоит из двух тел: корпуса и внутреннего тела. Внутреннее тело движется в полости корпуса и не взаимодействует с внешней средой. Корпус взаимодействует с внешней средой, оказывающей сопротивление его движению. Сила сопротивления внешней среды движению корпуса пропорциональна скорости последнего, причем коэффициент пропорциональности зависит от направления движения. В дальнейшем такой закон сопротивления для краткости будем называть кусочно-линейным. При движении внутреннего тела в полости корпуса возникает сила реакции, действующая на корпус и вызывающая его ускорение. Таким образом движение внутреннего тела внутри полости корпуса при определенных условиях вызывает движение корпуса во внешней среде. Следовательно, управляя относительным движением внутреннего тела, можно управлять прямолинейным движением двухмас-совой системы как целого. Целью управления является обеспечение такого периодического относительно корпуса закона движения внутреннего тела, при котором средняя за период скорость системы как целого максимальна.
Описанная система, в частности, представляет собой прототип мобильного робота, способного перемещаться во внешней среде только посредством взаимодействия с ней своим корпусом. Для реализации такого рода движения отсутствует необходимость применения внешних приспособлений, например, колес или гусениц, а также отбрасываемых частей, как при реактивном движении. Корпус подобного робота может быть сделан гладким и герметичным, что позволяет использовать его, например, для инспекции тонкостенных трубопроводов малого диаметра или в медицине. Задачи, связанные с оптимизацией режимов управления системами данного типа, представляют интерес для исследователей в области оптимального управления, а также прикладной механики и робототехники.
Задача оптимизации движений в сопротивляющейся среде тела, управляемого посредством его взаимодействия с подвижным внутренним телом, рассматривалась в ряде статей. Например, в [1—4] представлено решение данной задачи для простых классов периодических относительных движений внутреннего тела, при которых относительная скорость этого тела предполагается кусочно-линейной с дополнительными ограничениями. Кроме кусочно-линейного закона сопротивления в этих статьях анализируются также степенной закон сопротивления и закон трения Кулона, а в качестве управляющего воздействия выбрана относительная скорость внутреннего тела. В [5] опускаются все ограничения на относительную скорость тела, кроме ее периодичности, и ищутся непрерывные решения для этой скорости, при этом в качестве управления выбрано относительное ускорение внутреннего тела. В статье исследован довольно широкий
* Работа выполнена при финансовой поддержке РФФИ (проект 11-01-00513).
х
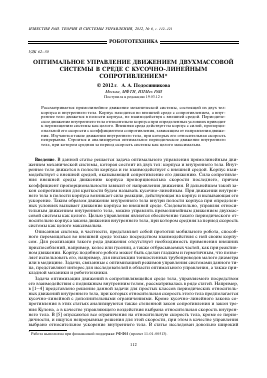
Рис. 1. Механическая система
класс законов для силы сопротивления внешней среды, не включающий в себя, однако, случая кусочно-линейного сопротивления. Решается задача оптимального управления двухмассовой системой в схожей с [5] постановке для случая кусочно-линейного сопротивления внешней среды.
Похожие задачи описаны также в [6, 7]. Основные отличия заключаются в том, что в [6] корпус управляется посредством взаимодействия с двумя внутренними телами, движущимися в перпендикулярных направлениях, а в [7] сделано дополнительное предположение, что вся система расположена на наклонной плоскости. Предложенный принцип движения был реализован в ряде экспериментальных моделей мобильных роботов, например, в [8, 9]. Существование таких экспериментальных моделей подтверждает возможность реализации данного принципа движения на практике.
1. Описание механической системы. Рассматривается механическая система, состоящая из двух твердых тел: корпуса массой M, взаимодействующего с внешней средой, и внутреннего тела массой m, взаимодействующего с корпусом, но не взаимодействующего с внешней средой (рис. 1). На корпус со стороны неподвижной внешней среды действует сила сопротивления, зависящая от абсолютной скорости корпуса (относительно внешней среды). Оба тела перемещаются вдоль горизонтальной прямой. Будем исследовать движение всей системы как целого,управляемое периодическим движением внутреннего тела относительно корпуса. Через x(t) и v(t) обозначим координату и скорость корпуса вдоль линии движения относительно внешней среды, т.е. в неподвижной системе координат, а через 2,(t), w(t) и u(t) — координату, скорость и ускорение внутреннего тела относительно корпуса. Тогда кинематические уравнения движения внутреннего тела относительно корпуса записываются как
4 = w, 4 = u, (i.i)
а кинематическое уравнение движения корпуса принимает вид
x = V. (1.2)
В качестве управляющего воздействия будем рассматривать относительное ускорение внутреннего тела u(t).
Сила сопротивления внешней среды движению корпуса R(v(t)) удволетворяет неравенству vR(v) < 0 и условию R(0) = 0. Динамическое уравнение движения системы, состоящей из корпуса и внутреннего тела, имеет вид
(M + m)x = -m + R(v). (1.3)
В данной работе ограничимся линейным анизотропным сопротивленим внешней среды, при котором сила сопротивления зависит от скорости корпуса по закону R(v) = -k(v)v с коэффициентом сопротивления k(v), зависящим от направления движения:
k(v) = k+, если v > 0, k(v) = k_, если v < 0, причем
0 < k+ < k_. (1.5)
В [4] показано, что в случае линейного изотропного сопротивления внешней среды никакое периодическое движение внутреннего тела не приведет к смещению системы как целого за период. Условие k+ < k_ означает, что сила сопротивления при движении в положительном направлении
оси координат меньше, чем при движении в отрицательном направлении. Смена знака в данном неравенстве ведет к изменению направления смещения системы за период, но не к изменению величины этого смещения.
2. Периодические режимы движения. Будем рассматривать такие движения системы, при которых относительная координата внутреннего тела и абсолютная скорость корпуса изменяются периодически с фиксированным периодом. Обозначая через T наименьший положительный период, запишем условия периодичности в виде
2,(0 = + nT), (2.1)
v(t) = v(t + nT), (2.2)
где время t e R+, а n — произвольное целое число.
Из условия периодичности относительной координаты внутреннего тела (2.1) следует периодичность с периодом T относительной скорости и относительного ускорения внутреннего тела
w(t) = w(t + nT), (2.3)
u(t) = u(t + nT), (2.4)
где время t e R+, а n — произвольное целое число, а из условия периодичности абсолютной скорости корпуса (2.2) следует периодичность с периодом T абсолютного ускорения корпуса v(t).
Не теряя общности, будем полагать, что в начальный момент времени t = 0 абсолютная скорость корпуса равна v0. Тогда условие ее периодичности (2.2) принимает вид
v(0) = v(T) = vo. (2.5)
Интегрирование на интервале [0, T] кинематических уравнений движения внутреннего тела (1.1) с учетом условия (2.3) периодичности ускорения w(t) ведет к интегральному уравнению
T
j u(t)dt = 0. (2.6)
0
Так как аналогичное уравнение имеет место для ускорения корпуса v(t), то из уравнения движения системы (1.3) следует условие
j R(v(t))dt
= 0, (2.7)
из которого вытекает, что среднее значение силы сопротивления за период является нулевым.
3. Задача оптимального управления. Движение двухмассовой системы, описываемое уравнением (1.3), во внешней среде с кусочно-линейным сопротивлением управляется относительным ускорением внутреннего тела u(t). Данная функция удовлетворяет интегральному ограничению (2.6), условию периодичности (2.4) и неравенству
|u(t)| < U. (3.1)
Будем искать такие периодические относительные движения внутреннего тела, удовлетворяющие условиям периодичности (2.1), (2.3), (2.4), уравнению (2.6) и ограничению (3.1), при которых выполнены следующие условия:
абсолютная скорость v(t) корпуса периодична с фиксированным периодом T, т.е. удовлетворят условию (2.5);
смещение корпуса за период x(T) - x(0) максимально.
Перейдем к безразмерным переменным согласно следующим выражениям:
M + mx zj = I. mUT2 ' S UT2' T'
M + m ~ w ~ u
v =-v, w = —, u = — ; (3.2)
mUT UT U
1DI mUT ~\ ~ T ,
r(v) =--RI-v I, k+ =-
mU \M + m ! m + M
0
В дальнейшем используются только безразмерные переменные, знак тильда в обозначении которых опускается. Перепишем закон кусочно-линейного сопротивления в виде
r(v) = k(v)v, (3.3)
где k(v) удовлетворяет (1.4) и (1.5), и сформулируем задачу оптимального управления следующим образом. Для краевой задачи
у = -u - r(v), (3.4)
w = u (3.5)
v(0) = v(1), (3.6)
w(0) = w(1) (3.7)
с функцией r(v), заданной согласно (1.4), (1.5) и (3.3), найти кусочно-непрерывное управление u(t), удовлетворяющее ограничению
|u(t)| < 1 (3.8)
и минимизирующее функционал
i
J = -j v(T)d т. (3.9)
0
Переписывая интегральное условие (2.7) в безразмерных переменных, получим уравнение
i
j r(v(t))dt = 0. (3.10)
0
Ут верждение 1. Непрерывная функция v(t), удовлетворяющая у
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.