ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2012, № 2, с. 166-176
СИСТЕМЫ УПРАВЛЕНИЯ ^^^^^^^^^^ ДВИЖУЩИМИСЯ ОБЪЕКТАМИ
УДК 621.395.17:519.2
ПЛАНИРОВАНИЕ ТРАЕКТОРИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В СЛОЖНЫХ УСЛОВИЯХ ПРИ НАЛИЧИИ УГРОЗ* © 2012 г. М. А. Андреев, А. Б. Миллер, Б. М. Миллер, К. В. Степанян
Россия, Москва, Институт проблем передачи информации РАН, Австралия, Мельбурн, Университет Монаш Поступила в редакцию 05.07.11 г.
В данной работе рассматривается полет беспилотного летательного аппарата в сложных условиях при наличии угроз. Угрозы задаются в терминах 2Б-рельефа. Оптимальная 2В-траекто-рия, минимизирующая риск при ограничениях на время перелета и скорость, находится с помощью преобразования задачи с незаданным граничным условием к задаче с фиксированным временем перелета и численного решения краевой задачи. Найденная 2Б-траектория используется для построения полиномиальной аппроксимации ЗБ-траектории с учетом рельефа местности.
Введение. Задача планирования траектории беспилотного летательного аппарата (БПЛА) в условиях риска известна очень давно [1, 2] и остается предметом исследований в последние годы, особенно в связи с планированием траекторий автономных БПЛА [3—7]. Начиная с оригинальных работ по планированию траекторий, задача планирования траекторий формулируется как задача определения траектории динамической системы с заданными начальным и терминальным условиями, которая минимизирует некоторый функционал, характеризующий интегральный риск и терминальный промах. Применение методов теории оптимального управления требует знания распределения угроз и его производных. На данном этапе решается задача определения оптимальной допустимой траектории при заданном стационарном распределении рисков и заданном рельефе местности. Предполагается движение с постоянной линейной скоростью, причем траектория выбирается с целью минимизации интегрального риска. Решение задачи ориентировано на использование численных методов, основанных на решении краевой задачи, к которой приводит необходимое условие оптимальности в форме принципа максимума.
1. Типовое распределение рисков. Типовое распределение рисков характеризуется следующим набором параметров:
координаты центров угроз; пространственное распределение риска.
Для заданных координат (xt,yt) центра /-го источника угроз (i = 1,..., M) пространственное распределение риска может иметь различные виды, например:
гауссовский [3], т.е. для описания пространственного распределения риска используется плотность вероятности гауссовской случайной величины с математическим ожиданием в точке (Xj, yt) и некоторыми среднеквадратическими отклонениями;
рациональный [4], который ближе к естественным физическим моделям, задается соотношением
Vm
fj(x, у) = —i—2 > Pi(x, у)
где pi(x, у) является расстоянием от текущей точки до центра /-го источника угроз, а Vj — относительная скорость БПЛА и /-го источника угроз в степени m; модифицированный рациональный [7]
Vm
f(x, у) = C(9)—V—j, Р i (x, у)
* Работа выполнена при частичной поддержке Australian Research Council Grant DP0988685 и РФФИ (грант № 10-0100710). А.Б. Миллер и К.В. Степанян частично выполняли работу во время визитов в качестве приглашенных исследователей в Университете Монаш (Мельбурн, Австралия).
где С(0) зависит от ориентации объекта и эквивалентна эффективному коэффициенту отражения.
Каждое представление имеет свои достоинства и недостатки, которые мы обсуждали в [8]. На основе предварительных исследований для заданных координат (х;-, у) центра /-го источника угроз (/ = 1,..., М) пространственное распределение риска определяется следующим соотношением:
1'(* у) = Т+Л-а+77-)2 • (1Л)
Т + с(х - X¡) + й1{у - у)
Данное представление не имеет сингулярностей, затрудняющих численное решение задачи (см., например, [4]), и характеризуется естественной физически реальной скоростью убывания при больших расстояниях от центра угрозы в отличие от гауссовского распределения [3]. Другие распределения угроз зависят от взаимного положения БПЛА и источника, и их моделирование требует знания формы БПЛА и его ориентации в пространстве и весьма затруднительно [5—7].
В представление (1.1) может быть добавлен поворот осей координат для отдельной угрозы:
у=т+хЬкх •
где использованы следующие обозначения:
я = Г с°8 ф 8*п ф1, к =
' c¡ 0 , x = 'x - x'
ч 0 dt . y - yt j
sin ф cos фу
1.1. Суммарное распределение угроз. Мы предполагаем, что суммарное распределение угроз (hazard rate) в заданной точке пространства (x, y) есть сумма отдельных интенсив-ностей угроз
M
f(x, y) = X fi(x, y) •
i = 1
С вероятностной точки зрения данное предположение соответствует случаю независимости источников угроз [3] и марковской модели формирования суммарного риска. В этой модели суммарная вероятность провала миссии есть монотонная функция интеграла вдоль траектории (x(t),y(t),z(t)) t 6 [0,T],
T
J = J f (x(t), y(t ))dt.
0
Мы также считаем, что рельеф местности либо описывается некоторой известной функцией h = h(x, y),
либо задан в форме цифровой карты, содержащей высоты
hj = h(xj > yj)
на некотором наборе точек (xj,yj), j = 1,..., N.
Следует отметить, что в рассматриваемой постановке распределения угроз не зависят от высоты, и поэтому фактически используется не сама траектория, а ее проекция на плоскость z = 0, так как предполагается, что дальность полета небольшая и учитывать кривизну Земли не требуется.
2. Модель движения и критерий качества. 2.1. Кинематическая модель БПЛА. На первом этапе используем простейшую модель управляемого движения, описываемую уравнениями
x(t) = VcosycosO, y(t) = VsinycosO, Z(t) = V sinO,
где V e [Vmin, Vmax] — заданная постоянная скорость, а управления у е [-п, п],0 е [-п/2, п/2] — угол курса (рыскания) и угол тангажа соответственно.
-1 -2 -3 -4
-5
-4 -3 -2 -1
0
1
2
3
4
5
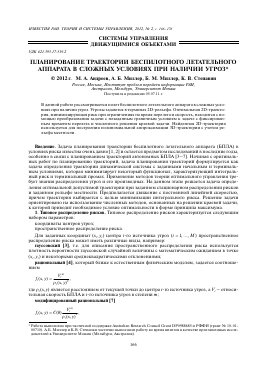
Рис. 1. Контурная карта распределения риска для источников угроз (2.2)
Начальное положение А = (х(0),у(0), г(0)) = (х0, у0, г0) и конечное В = (х(Т), у(Т), г(Т)) = (хт, ут, гт) известны. Также заданы ограничения на допустимое время перелета Т е [Тт;п, ттях] и на скорость V е [Ут„,Утях], удовлетворяющие соотношениям
Ь = У(Хт - х(0))2 + (Ут - у(0))2 + (гт - г(0))2 < ГтяхТтШ,
Ь ^(Хт - х(0))2 + (Ут - У(0))2 + (гт - г(0))2 < ГтпТтях-
2.2. Критерий качества. Целью задачи управления является нахождение траектории, удовлетворяющей начальным и терминальным ограничениям, очевидному ограничению на высоту полета г(0 > к(х(ф),у(0) и, возможно, дополнительному ограничению
г(0 < И(х®,уф), которая бы минимизировала критерий качества
/ =
I[/(х(), у(0) + Ф(х(), у(0, г(0)]л + [х(т) - Хт)2 + (у(т) - Ут)2 + (г(т) - гт)2]
(2.1)
где первое слагаемое под знаком интеграла есть типовое распределение рисков, которое характеризуется координатами центров угроз и пространственным распределением риска. Функция ф(х, у, г) — некоторая штрафная функция, которая характеризует штраф за отклонение от заданного диапазона высот. Терминальное слагаемое в критерии качества (2.1) со значением к > 1 характеризует штраф за отклонение траектории от конечного положения В = (хт, ут, гт). Пример контурной карты пространственного распределения риска для набора угроз
4.0 , 2.0
/ (х, У) =
1.0 + (х +1.3)2 + (у +1.3)2 1.0 + (х -1.9)2 + (у -1.6)2 1.0 , 1.0
(2.2)
1.0 + (х - 0.4)2 + (у - 0.1)2 0.5 + (у - 0.1)2 + (х - 0.6)2 показан на рис. 1.
0
3. Сведение к задаче поиска 2D-траектории. Поскольку решение исходной задачи оказалось очень чувствительным по вспомогательным переменным (изменение на 10-3 в начальной точке приводит к изменениям на единицы в конечной, что делает его неприемлемым с практической точки зрения [9]), то разбиваем задачу на две части: формирование плоской траектории и управление по высоте вдоль найденной плоской траектории.
3.1. Кинематическая модель БПЛА. Для решения первой подзадачи используем модель плоского движения с постоянной линейной скоростью V
x(t) = V cos y,
(3.1)
y(t) = V sin y,
где управление у e [-п, п] — угол курса (рыскания).
3.2. Постановка задачи. Мы считаем, что известны начальное положение A = (x(0), y(0)) и конечное B = (xT, yT), заданы ограничения на допустимое время перелета T е [Tmin, Tmax] и на скорость V е [Vmin, Vmax], удовлетворяющие ограничениям
L = V(ж? - x(0))2 + (yT - y(0))2 < FmaxTmin L = V(XT - x(0))2 + (Ут - y(0))2 < VminTmax
Задача состоит в определении времени T* е [Tmin, Tmax] и управления y(t), t е [0, T*], минимизирующих критерий качества
min j(т*,v,уо, k)
т , V, у(-)
при заданном фиксированном k. Данная задача относится к классу задач с нефиксированным временем и параметрами, поэтому ее решение является достаточно затруднительным, поскольку приводит к дополнительным краевым условиям [10, §2.7; 2.8]. Упрощаем постановку задачи, приводя ее к задаче оптимального управления с фиксированным временем.
3.3. Вспомогательная задача с фиксированным временем. Сделаем в интеграле (2.1) замену переменных 5 = t/ T*, тогда
J =
T *| f (x(s T *), y(sT*))ds = T *| f(X(s) y(s))ds,
где переменные (x(s), y(s)) удовлетворяют граничным условиям
(x(0), y(0)) = (x(0), y(0)), (x(1), y(1)) = (x(T), y(T)) (3.2) и уравнениям
x(s) = T*V cos y(sT*) = Feos y(s), y(s) = T*V sin y(sT*) = Fsin y(s). (3.3) Здесь V выбирается из условия разрешимости задачи
V ^ [miniVmaxTmin, ^min^max!, maXiVmaxTmin, VminTmax}]' (3.4)
Вспомогательная задача с фиксированным временем формулируется как задача на минимум критерия
i
Jaux = \ f (x(s), y(s))ds,
0
на траекториях, удовлетворяющих (3.3) и терминальным условиям (3.2), с выбором модифицированной скорости V, которая фактически равна длине траектории, удовлетворяющей условию (3.4). Решение вспомогательной задачи дает оптимальное значение модифицированной скорости V и оптимальное управление y(s), s е [0,1], и минимальное значение критерия качества Jaux.
3.4. Определение оптимального управления во вспомогательной задаче с помощью принципа максимума. Задача оптимального управления решается
при фиксированном параметре V. Поскольку задачи с терминальными условиями достаточно сложны,
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.