0,05
0,15
0,25
0,35
0,45
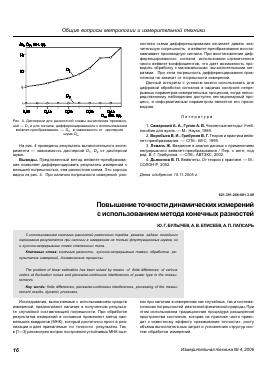
Рис. 4. Дисперсии для разностной схемы вычисления производной — D1 и для сигнала, дифференцированного с использованием вейвлет-преобразования, — D2 в зависимости от дисперсии шума Dш
На рис. 4 приведены результаты вычислительного эксперимента — зависимость дисперсий 01, й2 от дисперсии шума.
Выводы. Предложенный метод вейвлет-преобразова-ния позволяет дифференцировать результаты измерений с меньшей погрешностью, чем разностная схема. Это хорошо видно из рис. 4. При наличии погрешности измерений раз-
ностная схема дифференцирования начинает давать значительную погрешность, а вейвлет-преобразование восстанавливает производную сигнала. При восстановлении дифференцированного сигнала использовали ограниченное число вейвлет-коэффициентов, что дает возможность проводить обработку с минимальными вычислительными затратами. При этом погрешность дифференцирования практически не зависит от погрешности измерений.
Данный алгоритм с успехом можно использовать для цифровой обработки сигналов в задачах контроля непрерывных параметров измерительных процессов, когда непосредственному наблюдению доступен нестационарный процесс, а информативным параметром является его производная.
Л и т е р а т у р а
1. Самарский А. А., Гулин А. В. Численные методы: Учеб. пособие для вузов. — М.: Наука, 1989.
2. Воробьев В. И., Грибунин В. Г. Теория и практика вейв-лет-преобразования. — СПб.: ВУС, 1999.
3. Леваль Ж. Введение в анализ данных с применением непрерывного вейвлет-преобразования / Пер. с англ; под ред. В. Г. Грибунина. — СПб.: АВТЭКС, 2002.
4. Дьяконов В. П. Вейвлеты. От теории к практике. — М.: СОЛОН-Р, 2002.
Дата одобрения 15.11.2005 г.
621.391.266:681.3.08
Повышение точности динамических измерений с использованием метода конечных разностей
Ю. Г. БУЛЫЧЕВ, А. В. ЕЛИСЕЕВ, А. П. ЛАПСАРЬ
С использованием конечных разностей различного порядка решена задача линейного оценивания результатов при наличии в измерениях не только флуктуационных шумов, но и кусочно-непрерывных помех степенного типа.
Ключевые слова: конечные разности, кусочно-непрерывные помехи, обработка результатов измерений, динамические процессы.
The problem of linear estimation has been solved by means of finite differences of various orders at fluctuation noises and piecewise-continuous interferences of power type in the measurements.
Key words: finite differences, piecewise-continueus interferences, processing of the measurement results, dynamic processes.
Исследования, выполняемые с использованием средств измерений, предполагают наличие в полученном результате случайной составляющей погрешности. При обработке результатов измерений в основном применяют метод наименьших квадратов (МНК), который достаточно прост в реализации и дает приемлемые по точности результаты. Так, в [1—3] рассмотрен вопрос построения устойчивых МНК-оце-
нок при наличии в измерениях как случайных, так и систематических погрешностей различной физической природы. При этом использована традиционная процедура расширения пространства состояния, которая на практике часто приводит к известному эффекту «размывания точности», росту объема вычислительных затрат и усложнению структур систем обработки измерений.
Более сложной является задача оценивания результатов в условиях непрерывных или гладких помех, математические модели которых известны с точностью до вектора случайных параметров. Оптимальное решение такой задачи часто удается найти с использованием принципа инвариантности при соблюдении условий регулярности и несмещенности [4—6].
И наконец, совсем проблематична задача оценивания результатов при наличии в измерениях кусочно-непрерывных помех, описываемых на интервалах непрерывности произвольными полиномами со случайными коэффициентами. Любая попытка применения к решению такой задачи классического МНК либо его известных разновидностей обречена на провал, поскольку к настоящему времени не существует соответствующей теоретической базы для решения такого класса задач.
Ниже дано обоснование основных теоретических посылок решения указанной проблемы применительно к кусочно-непрерывным помехам, имеющим конечное число точек разрыва первого рода на всем отрезке наблюдения и описываемых на интервалах непрерывности степенными полиномами со случайными коэффициентами.
Развиваемый метод наиболее эффективен для задач с переходными процессами, например, измерений, используемых для исследования процессов в динамическом режиме. Другим примером может служить функционирование измерительной системы в процессе распознавания полезного сигнала на фоне скачкообразно изменяющихся помех в случайные моменты времени при естественных и искусственных воздействиях [7].
Постановка задачи. Пусть на отрезке [?0, Т ] исследуем процесс, представляющий аддитивную скалярную смесь у (?) полезного сигнала х(?), кусочно-непрерывной помехи и флуктуационного шума £,(?) (в дискретном времени):
у ^) = х(^) + Л(^) + ф), tj е[ Т]у = о. (1)
Полагаем
х^) = £ аг цг ^), й е {0,1, 2,...}, (2)
г = 0
где {аг }}= о — набор неизвестных коэффициентов; {г ^)}} о — система заданных линейно-независимых функций таких,
как
Ограничение такого типа широко используют в практике измерений [3].
Помеха относится к классу кусочно-непрерывных, т. е. на отрезке [?0, Т] имеет конечное число точек разрыва
первого рода и на интервалах непрерывности
описывается степенными полиномами
t е
^ -1-1/
М;
Л () = £ Ь„
I=о
t е
?- f/_ 1 , М/ е {0,1,2,... }, ti _ 1, ti с[[, Т], /=П, (5)
/ * *
где [о, Т] = и ь -1, £ и 11
/ = 2 ^ - . -
to = Ь, tL = Т.
Полагаем, что точки разрыва помехи, а также параметры , Ьц и ^ априори неизвестны.
Отсчеты {{ j )}} о шума £,(?) подчиняются совместному распределению с нулевым математическим ожиданием и корреляционной матрицей К[о] = [[], т, I = 0, м], где
= М {(^ )} — корреляционный момент случайных
величин ) и , , ^е {{0, ..., tN}^, М{} — символ
математического ожидания (здесь и далее верхний индекс в квадратных скобках обозначает порядок конечной разности).
Требуется разработать оптимальный метод линейного оценивания параметров модели (2) по результатам измерений (1), инвариантный к помехе (5), при сделанных выше ограничениях (3), (4).
Конечные разности и их свойства. Рассмотрим на отрезке [[, Т] произвольную функцию 1 (?), заданную своими
отсчетами f (?,•), / = 0, N.
Дадим определение конечной разности. Под к-й конечной разностью от 1 (?) будем понимать следующую дискретную функцию аргумента у:
¿4 Ц V & = д (гк) Ц) * 0 ^ = 0, О, к = 0, п tе[[ о, Т]. (3) Д [П, = £ (_ 1),+к с, , (tj+(), к е {0, 1,...,п}, у = 0^, (6)
/=о
В (3) и далее верхний индекс в круглых скобках обозначает порядок производной.
Кроме того, полагаем выполненным следующее ограничение на производную х(к) (?):
тах х(к) (t)| <у' I '
(к)
(4)
где у(> о, к = 0, п.
где С/ = к! 1(1!(к - I)!).
Так, первая и вторая конечные разности от 1 (?) будут иметь вид
Д1 [Г]у = Г ^ у+1)- ^ ^у), У = 0, N -1; Д2 [f]у = Д1 [Д1 [f];] = f (^+2) - 2f (^+1)+ f (^), у = 0,
= 0, N - 2.
5—430
Очевидно, что А0 [/]у = /(?у), ] = 0, N.
Если функцию 1 (?) задать на равномерной сетке {?у }}= о с шагом т, то (6) примет вид
Ak [f]j = I(- 1)''+k Ckk f [f + т(j + i)] , k e {0, 1, 2,..., n),
i=0
j = 0, N - k ■
(7)
Несложно убедиться, что к-я и (к - 1)-я конечные разности связаны следующим образом:
Ак [Г ]у = А1 [ -1 [Г]у ]] -1 [Г]у+! - Ак -1 [Г]у , у = 0, N - к. (8)
Непосредственно из (7) и (8) следует, что конечно-разностный оператор Ак [ ]у линеен:
Ак [а/ + Рд ] = аАк [/ ] у + РАк [ ], а, Ре
где 1 = 1 (?), д = д(?) — заданные функции на отрезке [[, Т]. Рассмотрим семейство степенных полиномов
/о(?) = со; /1 (?) = со + С1?; /2(?) = Со + с* + с2?2;... £(г) = £с,- ?г,
,=о
где {с,},=о — произвольные коэффициенты (с, е Я1).
Несложно показать, что при к > г выполняется равенство
Ак [f (t)]. = 0 V j = 0, N - k,
т. е. действие оператора А [] во многом аналогично действию оператора к-кратного дифференцирования над степенными полиномами: каждое последующее применение
оператора А1 []у снижает на единицу степень полинома —
результата дифференцирования.
Из сказанного выше можно сделать два принципиальных вывода:
1. По аналогии с операторами дифференцирования можно подобрать такой порядок п оператора Ап [ ]у, что
А" f (t)]. = An
m j
i bj
l = 0
( * ^ l' / n (*
t -t i -1 = 0 V tj e t i -1, ti , i = 1, L,
V V -
j
* *
где n>M, M=maxM', т. е., оператор An []j при выполнении
условия п >М полностью подавляет кусочно-степенную по-
меху (?) на любом полуинтервале непрерывности
* *
* /-rf,
2. В операторах Ак [ ]у (где к = 0, п) отсутствуют некорректные операции деления на число тк и предельного перехода при т ^ 0, характерные для оператора к-кратного дифференцирования.
Если помеху Л(?) рассматривать не только на полуинтер-
вале
t i-1, ti
но и на всем отрезке исследования процесса
[?0, Т], то применение оператора Ап [ ]у позволяет почти всюду подавить помеху Л(?) за исключением, может быть, конечного числа точек разрыва первого рода. Например, при вычислении конечной разности первого порядка
a1N )]=h (t j+i)-h (t j),
где t j e
/ n * * (* *
t i -1, ti , tj+1e t', t i +1 , т. е
V - V -
т. е. на стыке двух степенных
полиномов (?) и + 1 (?) появляется скачок (выброс)
+ I
Л(tj+1)-Л(tj)=Л+1 (tj+1)-Л (tj)= i b+i
M,
- i b'i i=0
Mi +1
i
l = 0
i
tj+1-1 i
tj -ti-1
* 0.
(9)
/
В дальнейшем будет показано, что возможные аномальные выбросы (9) легко устранить известными методами коррекции грубых ошибок (промахов) измерений.
Оптимальное оценивание результатов измерений. Применим к полученному результату (1) конечно-разностный
оператор Ак [ ]у:
Ак [у]у = Ак [х]у + Ак [Л]у + Ак [£]у, к=0ТП.
Учитывая (2), (5), (7) и пренебрегая возможными выбросами (9), для конечно-разностного оператора Ап []у имеем
Ап [у]у = А" [X]у + А" £]у = £ (-1)'' + п СП X (?у +,) +
i = 0
+ i ( -i)'+n с n j+i).
i=0
(10), получим
An [y]j = I ^(-1)'+n СП arqr(?j+') + }t (-1)'+n СП' ^(??+').
(10)
,=о
Подставив (2) в (10),
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.