КОСМИЧЕСКИЕ ИССЛЕДОВАНИЯ, 2004, том 42, № 3, с. 280-294
УДК 519.7
СИСТЕМА СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ОСНОВЕ НЕЙРОНОПОДОБНОЙ СИСТЕМЫ АВТОНОМНОГО АДАПТИВНОГО УПРАВЛЕНИЯ
© 2004 г. Ä. Ä. Жданов1, Л. В. Земских1, Б. Б. Беляев2
1 Институт системного программирования РАН, г. Москва 2 Научно-производственное объединение им. А.С. Лавочкина, г. Химки Поступила в редакцию 29.10.2002 Г.
Настоящая работа посвящена применению метода Автономного Адаптивного Управления (ААУ), разрабатываемого в отделе имитационных систем Института системного программирования РАН, к задаче стабилизации углового движения космического аппарата. Основные достоинства метода, применительно к рассматриваемой задаче, заключаются в отсутствии необходимости построения и закладки в систему управления математической модели объекта управления и обеспечении высокого качества управления, не предоставляемого традиционной системой управления. За счет оптимизации системы при помощи генетических алгоритмов, достигается экономия вычислительных и аппаратных ресурсов без потери качества управления и адаптивных свойств системы управления.
ВВЕДЕНИЕ
Подавляющее число систем управления, сконструированных в прошедшем XX веке, было основано на достижениях в области математического моделирования управляемых объектов и процессов. Однако при всей достигнутой изощренности математики, в том числе численных методов, явно обнаруживает себя предел ее возможностей. При переходе от математической идеализации моделируемого объекта к учету его более реальных свойств мы часто получаем такое катастрофическое усложнение математической модели, что ситуацию не могут спасти ни численные методы, ни высокая производительность современной вычислительной техники. Нелинейности, нестационарности, изменчивость свойств объекта управления в процессе его функционирования, множественность режимов работы объекта управления, стохастические и детерминированные помехи, влияние окружающей среды, а также априорная неопределенность свойств объектов - эти и другие причины либо совсем не поддаются математической формализации, либо чрезвычайно затрудняют ее.
Вместе с тем, ситуация не представляется принципиально безнадежной. Хорошо известно, что в естественной природе можно наблюдать разнообразные управляющие системы, успешно управляющие объектами именно в таких условиях. Речь идет о нервных системах живых организмов. Это дает нам уверенность в том, что существует принцип управления, который, с одной стороны, не использует математических моделей объектов управления, а с другой стороны - успешно справляется с управлением разнообразными объектами - от простейших одноклеточных
организмов до человека, в условиях изменчивости их свойств, априорной неопределенности и тесного взаимодействия с крайне сложной окружающей средой. Такие системы управления работают с эмпирическими знаниями, накапливаемыми организмом в процессе его функционирования.
Попытки понять, моделировать и использовать биологические принципы управления предпринимаются в последние десятилетия, они составляют так называемое имитационное или бионическое направление систем "искусственного интеллекта". Напомним здесь также о другом направлении развития таких систем, называемом программно-прагматическим или терминальным направлением, к которому относят системы, решающие интеллектуальные задачи без попытки воспроизвести сам способ, каким подобные задачи решаются нервными системами или мозгом. Это экспертные системы, системы распознавания, системы принятия решений и некоторые другие. Отношение к системам "искусственного интеллекта" в целом многократно менялось в соответствии с его успехами, неудачами и другими причинами. Однако для нас очевидно, что системы, воспроизводящие природные механизмы управления (оба названных направления), вынуждены будут развиваться, поскольку очевидно, что решение существует, оно реализовано в действующих природных прототипах, эффективно решающих задачи, которые трудны для традиционных методов управления. Более того, освоенный человечеством подход, основанный на математических формализациях, является, по-видимому, частным случаем "естественного" метода управления. Основное назначение нервных систем, по
нашему мнению, состоит в управлении поведением организма, где исполнительными устройствами являются мышечно-секреторные органы, а нервная система оперирует информационными объектами - образами. Необходимым свойством управления при этом является правильное прогнозирование эволюции системы организм-среда. Так, нервная система дает команду на сокращение той или иной мышцы только потому, что она прогнозирует результат выполнения этого действия. Развитие нервной системы как вида, так и отдельного индивида идет в направлении развития умения прогнозирования. Человек, как вид, вырабатывает образы уже очень сложных и абстрактных закономерностей, существующих в природе, они помогают описывать и прогнозировать явления и свойства нашего мира. Математические образы - не более чем одни из таких сложных образов, сформированных в нервных сетях мозга человека (кстати, исторически совсем недавно). Тем самым, математика есть инструмент, созданный и действующий в среде естественного способа управления, а математические методы управления есть частный случай "естественного" способа управления, реализованного природой в нервных системах. Как всякое формализованное знание, математика имеет свою ограниченную сферу применения. Так, например, известно, что формальные системы требуют привнесения извне исходных данных, аксиом, гипотез и критериев.
Авторы данной статьи разрабатывают метод "Автономного Адаптивного Управления" (ААУ) [1], который относится к имитационному направлению систем искусственного интеллекта. В настоящей работе отражен опыт построения на основе метода ААУ прототипа системы управления угловым движением космического аппарата. Сначала коротко рассмотрим основные положения метода ААу, затем покажем, как на основе этого метода можно построить адаптивную систему управления угловым движением КА и оптимизировать систему с помощью генетических алгоритмов.
1. МЕТОД АВТОНОМНОГО АДАПТИВНОГО УПРАВЛЕНИЯ
Управляющая система (УС) в методологии ААУ имитирует нервную систему живого организма. Под объектом управления (ОУ) будем понимать организм, который несет в себе нервную систему. Другими словами, ОУ - это объект, который должен управляться посредством УС, расположенной внутри ОУ и взаимодействующей со своим окружением посредством блока датчиков (БД) и исполнительных органов (ИО).
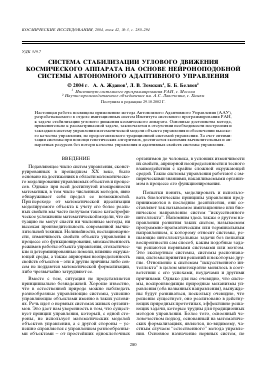
На рис. 1 представлена система в целом, под которой будем понимать среду, в которую вложен ОУ, в свою очередь содержащий в себе УС. Можно утверждать, что УС управляет не только
Среда и
Среда W
Среда 8
ОУ
Г Блок датчиков
^^^^ Исполняю- м щий орган
УС
Формирование, оценивание и распознавание образов
ораз'
Оценивание состояния ОУ
Формирование базы знаний
I
Выбор действия
Определение времени принятия решения
Рис. 1. Представление системы "управляющая система - объект управления - среда" согласно методологии ААУ.
объектом управления, но всей системой. Под средой в такой системе можно понимать разные объединения объектов: совокупность объектов, лежащих вне УС, совокупность объектов, лежащих вне ОУ или всю систему. Блок датчиков поставляет УС входную информацию в виде двоичного вектора.
В управляющей системе ААУ следует выделить основные подсистемы, решающие следующие задачи: формирование и распознавание образов; база знаний; моделирование эмоций; принятие решений.
Подсистема формирования и распознавания образов (ФРО) осуществляет поиск статистически неслучайных пространственно-временных закономерностей в потоке входной информации, поступающей от блока датчиков. Если такая закономерность обнаруживается, то говорим, что сформирован соответствующий "образ". Образу присваивается очередной идентификатор О, который запоминается в динамически расширяющемся алфавите классов, который мы называем "памятью образов" УС. Наличие в памяти образов идентификатора О, говорит о том, что этот образ сформирован. Неслучайная пространственно-временная закономерность, которая породила данный образ, называется его прообразом. Эта же подсистема ФРО должна уметь распознавать уже сформированные образы. Это означает, что УС должна "узнавать" в потоке текущей входной информации прообразы тех образов, идентификаторы которых хранятся в ее "памяти образов". Если УС узнала прообраз образа О, в момент г, то
пишем О, = 1. Если образ О, в момент г остается нераспознанным, то пишем Ог = 0. Подсистема ФРО может формировать образы над образами, если имеются статистически неслучайные закономерности в фактах распознавания определенных образов. Это будут образы 2-го и большего порядков.
Выходы блока датчиков можно считать образами 0-го порядка. Подсистема ФРО, как система автоматической классификации, снабжена заданными правилами формирования образов. Другими словами, если образы полагать классами (или кластерами) в системе распознавания, то правила задания классов должны быть заданы априори.
Следует обратить внимание, что во входном векторе, поступающем от БД, могут быть компоненты, поступающие от датчиков, установленных на исполнительных органах. В этом случае прообразами некоторых из сформированных образов могут быть такие последовательности событий, в которые, наряду с воздействиями со стороны среды, входят воздействия со стороны исполнительных органов. Если некоторый вид таких прообразов соответствует "образу", отражающему неслучайную последовательность трех событий: а) состояние системы в момент te; b) воздействие исполнительного органа в момент f; c) состояние системы в момент tg, где моменты времени строго упорядочены, te < f < tg, и f - te = = Att = const, и tg - tf = At2 = const, то этот специфический образ мы интерпретируем как элемент "знаний" и запоминаем его в специальном разделе памяти, названном "базой знаний". Другими словами, "знание" это образ, отражающий эмпирически найденную импликацию трех событий: "условие" —► "действие" —► "результат"
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.