ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2012, № 3, с. 3-12
УПРАВЛЕНИЕ В ДЕТЕРМИНИРОВАННЫХ СИСТЕМАХ
УДК 531.382:62-50
УПРАВЛЕНИЕ КАЖУЩИМСЯ УСКОРЕНИЕМ ТВЕРДОГО ТЕЛА, ЗАКРЕПЛЕННОГО В ДВУХСТЕПЕННОМ ПОДВЕСЕ НА ПОДВИЖНОМ ОСНОВАНИИ*
© 2012 г. Л. Д. Акуленко, Н. Н. Болотник, А. E. Борисов, А. А. Гавриков, Г. А. Емельянов
Москва, ИПМех РАН; Королев, ФГУПЦНИИМаш Поступила в редакцию 28.10.11 г.
Рассматривается механическая система, состоящая из подвижного основания и полезного объекта (абсолютно твердого тела), связанного с основанием посредством двухстепенного подвеса со взаимно перпендикулярными осями. Исследуется возможность обеспечить нулевое значение проекции кажущегося ускорения заданной точки объекта на плоскость, перпендикулярную фиксированной оси, связанной с объектом, за счет управляемого вращения рамок подвеса. Кажущимся ускорением заданной точки объекта называется разность между вектором абсолютного ускорения этой точки и вектором ускорения силы тяготения в ней. Сформулированы достаточные условия, при выполнении которых поставленная цель принципиально достижима. Выведены соответствующие уравнения вращения рамок подвеса. Рассматриваемая проблема имеет отношение к разработке систем управления гравитационно-чувствительными технологическими процессами на космических аппаратах.
Введение. Для развития современной электронной промышленности требуются полупроводниковые материалы очень высокого качества, которое определяется степенью совершенства монокристаллов, составляющих основу таких материалов. Эти монокристаллы выращиваются в течение продолжительного времени в расплавах соответствующих веществ. Из-за неустранимого в земных условиях влияния гравитационного поля на частицы расплава в нем возникают конвективные процессы, которые отрицательно сказываются на структуре монокристаллов и их электрофизических характеристиках. Физические процессы, вызываемые гравитационной конвекцией, принципиально ограничивают пределы совершенствования технологии выращивания монокристаллов в земных условиях.
Данное обстоятельство привело к предложению выращивать монокристаллы на орбитальных космических аппаратах в условиях, близких к невесомости. Исследования в этом направлении стали активно развиваться начиная с 70-х годов прошлого столетия. Только на орбитальных станциях серии "Салют" и орбитальном комплексе "Мир" было проведено в общей сложности более 450 экспериментов. Были получены полупроводниковые кристаллы, превосходящие по физическим характеристикам аналоги, полученные в земных условиях.
Тем не менее многие эксперименты обнаружили, что параметры, определяющие структурное совершенство и чистоту кристаллов, выращенных в условиях орбитального полета, оказались значительно хуже ожидаемых расчетных значений. Причиной оказались малые ускорения, которым подвергается экспериментальная технологическая установка, механически связанная с космическим аппаратом (КА), относительно "квазиинерциальной" системы отсчета, полюс которой расположен в центре масс орбитального КА, а координатные оси ориентированы на "неподвижные" звезды [1, 2]. Характерный порядок величины этих ускорений — от 10-6£ до 10-2#, где g ~ 9.8 м/с — ускорение силы тяжести на поверхности Земли, и их иногда называют микроускорениями. Влияние микроускорений на физические процессы, происходящие на КА, аналогично влиянию на них силы тяжести на Земле. Поэтому эффекты, обусловленные микроускорениями, называют микрогравитационными эффектами.
Бортовые микроускорения условно разделяются на вибрационные (фоновые) с частотами выше 10-2 Гц и квазистатические с частотами ниже 10-2 Гц. Вибрационные микроускорения в основном обусловлены работой штатной аппаратуры, деятельностью экипажа, собственными колебаниями КА, стыковочно-расстыковочными операциями и возмущениями со стороны испол-
* Работа выполнена при финансовой поддержке РФФИ (проекты № 11-01-00472 и № 11-01-12110) и Программы поддержки ведущих научных школ России (проект НШ-64817.2010.1).
нительных органов системы управления КА. Величины этих ускорений обычно лежат в диапазоне от 10-4# до 10-2£. Изоляцию бортовой технологической установки от вибрационной компоненты микроускорений можно в достаточной мере обеспечить пассивными (упругодемп-фированными) или активными виброизоляторами. Эту проблему можно считать решенной.
Основные причины квазистатических ускорений — это неоднородность гравитационного поля в пределах КА, ускорение КА из-за его взаимодействия с атмосферой Земли, вращение КА как твердого тела относительно своего центра масс при движении по орбите в режиме гравитационной стабилизации, низкочастотные колебания гибких навесных элементов конструкции. Величины этих ускорений в основном лежат в диапазоне от 10-6£ до 10-4^. Снижение модуля ускорения объекта при квазистатических вибрациях КА с помощью виброизоляторов требует очень больших амплитуд колебаний виброизолированного объекта относительно основания, что делает решение этой задачи практически невозможным.
Теоретические и экспериментальные исследования показывают, что квазистатические ускорения отмеченного выше диапазона оказывают существенное отрицательное влияние на протекание ряда важных гравитационно-чувствительных технологических процессов, к которым относится процесс выращивания кристаллов из расплава. Установлено, что степень этого влияния зависит от ориентации вектора квазистатического ускорения относительно характерного направления процесса, такого как направление градиента температуры, направление градиента концентрации вещества в технологической установке и др. Наибольшее воздействие оказывает величина проекции квазистатического ускорения на плоскость, перпендикулярную характерному направлению процесса [3, 4]. Для краткости будем называть эту величину боковой составляющей квазистатического ускорения.
В отличие от модуля квазистатического ускорения его боковую составляющую можно существенно снизить, закрепив технологическую установку (объект) с гравитационно-чувствительной средой на управляемой поворотной платформе, которая должна реагировать на изменение ориентации вектора квазистатического ускорения относительно объекта, поворачивая его так, чтобы в каждый момент времени минимизировать боковую составляющую квазистатического ускорения в заданной точке (области) объекта. Такая платформа была разработана [5—7]. Она представляет собой двухстепенной карданов подвес, оси вращения рамок которого пересекаются под прямым углом. Ось вращения внешней рамки связана с КА, а во внутренней рамке закрепляется объект. Вращения рамок осуществляются независимыми электроприводами с мо-ментными двигателями, которые создают высокий крутящий момент, что освобождает от необходимости использовать в приводах редукторы. Компоненты вектора микроускорения измеряются акселерометрами, жестко связанными с внутренней рамкой подвеса.
Анализ квазистатического ускорения [8—10] показал, что его величина и направление претерпевают значительные изменения со временем, которые носят случайный характер из-за случайности факторов, порождающих это ускорение. Поэтому невозможно исключить влияние пространственной эволюции вектора квазистатических ускорений на протекание гравитационно-чувствительных процессов с помощью программного (заранее рассчитанного) управления вращением платформы относительно борта КА. Требуется формировать управление по принципу обратной связи.
В данной статье исследуются предельные возможности снижения боковой составляющей микроускорения в заданной точке объекта, закрепленного на поворотной платформе. Приводы предполагаются идеальными, способными без переходных процессов отрабатывать требуемые угловые ускорения рамок подвеса. Строится алгоритм управления с обратной связью, при котором боковая составляющая микроускорения минимизируется для каждого текущего состояния движения объекта относительно КА, определяемого величинами углов поворота рамок подвеса и угловыми скоростями в соответствующих осях.
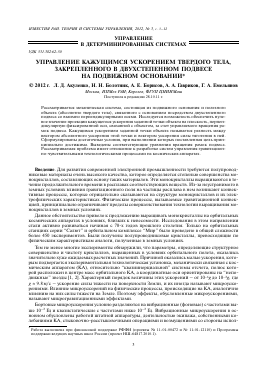
1. Описание механической системы. Кинематические соотношения. Рассматриваемая механическая система состоит из подвижного основания и полезного объекта, связанного с основанием посредством двухстепенного подвеса со взаимно перпендикулярными осями. Основание и объект считаются абсолютно твердыми телами. Кинематика подвеса схематически изображена на рисунке. Подвес содержит две рамки — внешнюю (1) и внутреннюю (2). Внешняя рамка может вращаться вокруг оси 3, жестко связанной с основанием. Внутренняя рамка может вращаться вокруг оси 4, которая жестко связана с внешней рамкой и перпендикулярно пересекает ось ее вращения в точке К. С внутренней рамкой жестко связан управляемый объект, содержащий полезную нагрузку.
Z
/ /
3 ГР/ /у
I
X \ ту
\ к
х у
/ / / / /
Введем две правые ортогональные системы координат: систему КХУ2, связанную с основанием, и систему Кху1, связанную с внутренней рамкой подвеса и, следовательно, с объектом. Начала обеих систем расположены в точке К пересечения осей подвеса, ось Z направлена вдоль оси вращения внешней рамки, ось х — вдоль оси вращения внутренней рамки, ось г лежит в плоскости внутренней рамки подвеса. Назовем исходной конфигурацию подвеса, при которой системы координат КХУ2 и Кхуг совпадают.
Будем характеризовать конфигурацию подвеса, определяющую текущее положение объекта относительно основания (относительно системы координат КХУ1), двумя углами — углом ф между осями КХ и Кх и углом у между плоскостью КХУ и осью Ку. За положительные направления при отсчете этих углов принимаются направление кратчайшего поворота от положительной полуоси КХ к положительной полуоси КУ для угла ф и направление кратчайшего поворота от плоскости КХУ к положительной полуоси для угла у. Углы ф и у можно трактовать как углы двух последовательных поворотов, которыми подвес приводится из исходной конфигурации в текущую. Первый поворот (на угол ф) производится вокруг оси ^, а второй (на угол у) — вокруг оси Кх. Этим поворотам отвечают соответственно матрицы
Г * =
и
Г у =
ео8 ф ф 0 - ф ео8 ф 0 0 0 1
'10 0 0 ео8 у у 0 - у ео8 у
Матрица Г перехода от
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.