ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2013, № 1, с. 122-134
СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖУЩИМИСЯ ОБЪЕКТАМИ
УДК 62.50, 531.8
УПРАВЛЕНИЕ, МИНИМИЗИРУЮЩЕЕ КОЛЕБАНИЯ СИСТЕМ С ПОДАТЛИВЫМИ ЭЛЕМЕНТАМИ*
© 2013 г. Л. В. Ганнель, А. М. Формальский
Израиль, Тель-Авив, Анорад (Рокуэлл Отомэйшн); Москва, НИИ механики МГУ Поступила в редакцию 19.06.12 г.
Изучается управляемая механическая система, содержащая устройство, которое обладает податливостью. Таким устройством может быть, например, податливая платформа, на которой крепится управляемый объект, или упругий редуктор, соединяющий двигатель с этим перемещаемым объектом. Управляющее воздействие (сила/момент) ограничено по абсолютной величине. Из резонансных частот, присутствующих в системе, учитывается только первая — низшая. При этом рассматривается система с двумя степенями свободы. Линейная математическая модель изучаемой системы содержит двукратное нулевое собственное значение и пару комплексных. Построен закон управления системой, при котором (в отсутствие демпфирования) управляемый объект переводится из заданного начального состояния покоя в заданное конечное за конечное время. Закон управления состоит из участков, на которых управляющее воздействие изменяется линейно во времени либо остается постоянным. Участки времени, на которых управляющее воздействие изменяется, выбираются равными периоду собственных колебаний системы. Это позволяет в отсутствие демпфирования в системе полностью избежать колебаний на участках времени, где управляющий сигнал не изменяется.
БО1: 10.7868/8000233881301006Х
Введение. При работе многих механизмов (металлообрабатывающих станков, роботов-манипуляторов, шагающих роботов, устройств типа экзоскелетона) возникают нежелательные вибрации, ухудшающие качество управления этими механизмами. Такие вибрации связаны обычно с наличием податливых элементов в конструкции управляемого объекта или в объектах окружающей среды, с которыми управляемый объект вступает в контакт. Податливыми могут быть платформа, на которой установлен управляемый объект, редуктор, связывающий двигатель с перемещаемым телом, сочленения датчиков с двигателем или (и) с перемещаемым телом, части этого тела.
При синтезе управления тем или иным объектом обычно стремятся обеспечить максимально быстрое достижение цели управления. Если податливость в элементах конструкции существенно влияет на процесс управления, то ее необходимо учитывать при построении математической модели управляемой системы и закона управления. Однако идентифицировать параметры податливых элементов конструкции зачастую бывает трудно. Если же параметры объекта известны недостаточно точно, то построение оптимального управления на основе математической модели теряет смысл, поскольку это управление не будет оптимальным для реального объекта. Надо отметить, кроме того, что построение оптимального по быстродействию управления связано с определенными трудностями, особенно для систем с большим числом степеней свободы.
В настоящей статье для управляемого объекта, расположенного на податливой платформе, исследуется "квазиоптимальный" закон управления, для реализации которого требуется знание только собственной частоты системы, которую во многих случаях можно довольно точно определить экспериментальным путем. Математическая модель двигателя, соединенного упругим редуктором с перемещаемым телом, совпадает по своей структуре с математической моделью управляемого объекта, расположенного на податливой платформе. Поэтому рассматриваемый здесь подход может быть использован и для системы, содержащей податливый редуктор.
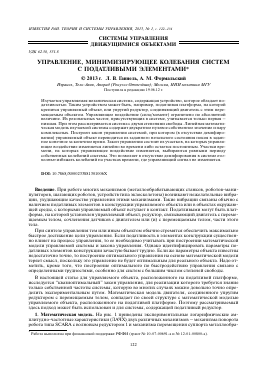
1. Математическая модель. На рис. 1 приведены экспериментальные логарифмические амплитудно-частотные характеристики (ЛАЧХ) двух различных механизмов — механизма поворота робота типа 8СЛЯЛ с волновым редуктором 1 и механизма перемещения суппорта металлообра-
* Работа выполнена при финансовой поддержке РФФИ (грант № 10-07-00691-а и № 12-01-00800-а).
Амплитуда, дБ 40
30 20 10 0 -10 -20 -30
-40 -50
104
Частота, Гц Рис. 1. Экспериментальные ЛАЧХ двух механизмов
Рис. 2. Управляемое тело массы т на податливой платформе массы М
батывающего станка с передачей "винт—гайка" 2. По оси абсцисс откладывается в логарифмическом масштабе частота входного сигнала в герцах, а по оси ординат — в логарифмическом масштабе отношение амплитуд выходного и входного сигналов в децибелах.
Как следует из рассмотрения рис. 1, первая резонансная частота для механизма поворота робота составляет примерно 5 Гц, а вторая — уже 600 Гц. Первая резонансная частота для металлообрабатывающего станка составляет 40 Гц, а вторая — больше 1000 Гц. В обоих механизмах вторая резонансная частота существенно выше первой. Исследования этих и других механизмов, как с податливым редуктором, так и с податливой станиной показывают, что одним из основных источников нежелательных вибраций является наличие первого резонанса в системе. Кроме того, "высокочастотные" резонансы обычно подавляются фильтрами. Поэтому рассмотрим в качестве математической модели управляемой системы с податливыми элементами двухмассовую систему с двумя степенями свободы, считая, что ее частота равна первой резонансной частоте реальной системы. Уравнения движения такой системы представим в виде
+ 4 + = -¥, т + х) = ¥. (1.1)
Уравнениями (1.1) описывается, например, движение управляемого объекта, расположенного на податливой платформе (см. рис. 2).
В уравнениях (1.1) и на рис. 2 через М обозначена масса платформы, через т — масса управляемого объекта. Для подавления внешних возмущений платформу в ряде случаев устанавливают на устройстве пассивной виброизоляции. Пружины на рис. 2 как раз моделируют податливость такого устройства. Слева от платформы изображена растянутая, а справа — сжатая пружина. На платформе расположен управляемый объект. Отклонение платформы от ее нейтрального положения обозначается через перемещение управляемого объекта относительно платформы — через х. В нейтральном положении, когда £ = 0, действия левой и правой пружин на платформу
уравновешиваются. Сумма 2, + х характеризует положение управляемого объекта в неподвижной системе координат. В уравнениях (1.1) е — коэффициент демпфирования в пружинах или коэффициент вязкого трения платформы о неподвижную поверхность или суммарный коэффициент демпфирования, к — коэффициент жесткости пружин. На платформе смонтирован привод, который развивает силу Ш, приложенную к управляемому объекту (привод может быть линейным или содержать механизм вида "винт—гайка"). Естественно, что при этом к платформе прикладывается сила -Ш, действующая в противоположном направлении. Сила трения между платформой и управляемым объектом не учитывается.
Система (1.1) в отсутствие управления (при ¥ = 0) имеет двойное нулевое собственное значение и пару комплексно-сопряженных; подобная система рассматривается, например, в работах [1—3]. Уравнения вида (1.1) описывают не только управляемый объект на податливой платформе, но также систему, представляющую собой двигатель, соединенный податливым редуктором с управляемым механизмом [3].
При достаточно малом коэффициенте демпфирования е система имеет комплексно-сопряженные собственные значения. Соответствующая собственная частота системы ю вычисляется по формуле
ю = 4 k -—г, (12)
IM 4M2
которая при e = 0 приобретает вид ю = 4Щ. Период собственных колебаний обозначим через 9, т.е. 0 = 2я/ю. Будем считать, что сила F, развиваемая двигателем, ограничена по абсолютной величине заданным значением F0
F < Fo (Fo = const). (1.3)
Наличие ограничения (1.3) на силу F обычно обуславливается ограничением на предельную силу тока в приводе, поскольку развиваемая двигателем сила пропорциональна силе тока. Пусть начальные условия будут нулевыми
% (0) = 0, 4 (0) = 0, x (0) = 0, X (0) = 0. (1.4)
При начальных условиях (1.4) перемещение платформы £, и скорость перемещения | равны нулю. Целью управления является приведение системы (1.1) в желаемое состояние
£ = 0, 4 = 0, х = xd, x = 0, (1.5)
где xd — желаемое положение управляемого объекта. В состоянии (1.5) так же, как и в начальном состоянии (1.4), перемещение платформы и ее скорость равны нулю.
Если в рассматриваемой системе отсутствует какая-либо податливость, т.е. платформа, на которой установлен управляемый объект, неподвижна = 0), то система (1.1) превращается в простое уравнение второго порядка
mX = F. (1.6)
Хорошо известно [4, 5], что, если xd > 0, то система (1.6) при ограничении (1.3) приводится за минимально возможное время в состояние x = xd, x = 0 при помощи релейного управления (см. рис. 3)
0 < х < xd 12,
Xdl2 < x < xd, (1.7)
x = xd ■
Минимальное время T процесса перемещения объекта (1.6) при управлении (1.7) выражается известной формулой [4, 5]
' F0 при
F = -F. при
0 при
T = 2
xdm
V F0 J
1/2
(1.8)
Fk
F0
-F0
T/2
О
t
Рис. 3. Оптимальное по быстродействию управление (1.7) системой (1.6)
При релейном управлении (1.7) "профиль" ускорения X (1.6) описывается выражением Я
[0 m
А
m
о
при
при при
0 < х < xd/2, xd/2 < х < Xd
(1.9)
х — xd.
2. Податливая система при релейном и плавном управлении. Оптимальное для модели (1.6) управление (1.7) является разрывным. Оценим его влияние на систему (1.1). Пусть
F =
при t < 0, при t > 0.
При управлении (2.1) система (1.1) имеет стационарное движение, при котором Я
? = — А к'
__0 m
(2.1)
(2.2)
Формулы (2.2) показывают, между прочим, что деформация £, противоположна по направлению ускорению х. Если ускорение х > П, то деформация 2, < П. Подобная ситуация (понятная с физической точки зрения) имеет место и при управлении упругим манипулятором [6, 7]. Если
%(0) = 0, 4(0) = 0, то решение системы (1.1), (2.1) (при e = О) имеет вид
\(t) = -А(1 - cosfflt), к
x (t)
F011 , m ,1 —11 + — cos ®t I.
m
M
(2.3)
(2.4)
Формулы (2.4) описывают колебания системы (1.1) "вокруг" стационарного движения (2.2), которые в отсутствие демпфирования (при е = 0) не затухают. Амплитуда этих колебаний зависит от параметров системы. Часто податливые элементы имеют слабое естественное демпфи
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.