ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА
Том 79. Вып. 1, 2015
УДК 629.7.087
© 2015 г. Ю. М. Заболотнов
УПРАВЛЕНИЕ РАЗВЕРТЫВАНИЕМ ОРБИТАЛЬНОЙ ТРОСОВОЙ СИСТЕМЫ В ВЕРТИКАЛЬНОЕ ПОЛОЖЕНИЕ С МАЛЫМ ГРУЗОМ
Рассматривается построение и анализ законов развертывания орбитальной тросовой системы, состоящей из двух концевых тел и троса, в вертикальное положение. Исследуется случай, когда масса одного концевого тела много больше суммарной массы второго концевого тела и троса, причем последние сравнимы по массе. При построении номинального закона управления развертыванием в вертикальное положение используется модель системы, состоящей из двух концевых материальных точек и троса, записанная в подвижной орбитальной системе координат для нерастяжимого троса. Реализуемость предлагаемых законов управления оценивается по модели управляемого движения орбитальной тросовой системы с распределенными параметрами при учете растяжимости троса.
1. Постановка задачи. Обычно задачу управления развертыванием орбитальной тросовой системы (ОТС) разбивают на две части: 1) построение номинальных (программных) законов управления, переводящих ОТС в заданное состояние, 2) синтез алгоритмов регулирования, обеспечивающих движением системы по построенным программам при действии различных возмущений. При решении первой части задачи используются или классические методы оптимального управления (метод максимума Понтрягина и др.), или методы параметрической оптимизации на основе уже известных законов управления. В последнем случае чаще всего применяются методы нелинейного программирования для обеспечения конечных условий движения груза.
В данной работе на основе построенной математической модели движения ОТС, учитывающей массу троса, производится модификация и параметризация известных законов управления развертыванием ОТС в вертикальное положение [1]. Модификация законов позволяет решить задачу о развертывании ОТС с малой массой концевого груза, сравнимой с массой выпущенного троса. Для построения программных законов управления используется модель с нерастяжимым тросом в подвижной орбитальной системе координат, часто применяемая для построения именно программных законов управления [2, 3], если жесткость троса достаточно велика.
После построения программных законов управления решается задача синтеза алгоритмов стабилизации, при рассмотрении которой также могут использоваться разные подходы: классические методы, основанные на линеаризации уравнений движения [4], а также методы, использующие численную оптимизацию процесса регулирования с помощью методов нелинейного программирования [5]. В последнем случае могут использоваться нелинейные модели движения ОТС.
После решения задачи синтеза регулятора проводятся поверочные расчеты по более полным моделям движения ОТС, где система чаще всего рассматривается как система с распределенными параметрами [6, 7]. На этом этапе моделируется работа системы регулирования с разной степенью детализации.
В данной работе для проведения поверочных расчетов используется дискретная (многоточечная) модель движения ОТС с распределенными параметрами, учитываю-
щая такие важные факторы, как растяжимость троса и инерционность механизма управления. Подобные математические модели движения ОТС использовались ранее для решения других важных задач динамики движения тросовых систем. Так, например, анализировалось свободное движение системы трос — груз (спускаемая капсула) после обрезания троса [7], рассматривались некоторые аварийные ситуации после отделения груза от базового космического аппарата (КА) и анализировалось его вращательное движение [8]. В настоящей работе при моделировании системы регулирования не учитываются такие факторы, как угловые движения груза [9] и базового КА, ошибки измерений [5], запаздывание и помехи при работе механизма управления, дискретность отдельных элементов системы регулирования и т.д. Поэтому рассматриваемую ниже поверочную математическую модель можно рассматривать как модель с так называемым "идеальным" регулятором. Однако проведение поверочных расчетов по этой модели — необходимое условие дальнейшего рассмотрения предлагаемых законов управления, так как в противном случае о возможной реализации этих законов говорить не приходится.
2. Уравнения движения. При выводе уравнений движения ОТС используются следующие допущения: 1) масса базового КА много больше суммы масс троса и груза, 2) базовый КА движется по неизменной круговой орбите, 3) трос всегда натянут и нерастяжим, и приближается к прямой, соединяющей точки крепления.
Для вывода уравнений пространственного движения ОТС удобно применить классические уравнения Лагранжа второго рода
d dt
/
3TC) 3TC dP + n. Ta R on
T- I-— = -^ + ; ¿1 = L, q2 =0, ¿3 =e (2.1)
Pli)
где Tc и P — кинетическая и потенциальная энергии системы, qt и ¿h (i = 1,2,3) — обобщенные координаты и скорости, L — длина троса, 0 и Р — углы, определяющие положение троса относительно плоскости орбиты базового КА, Q — обобщенные силы для непотенциальных сил.
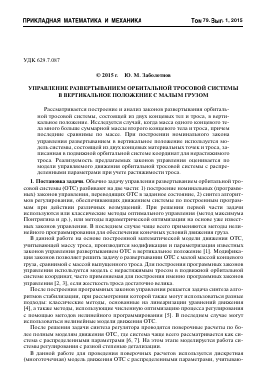
Положение используемых систем координат и направления отчета углов показаны на фиг. 1. Здесь Cx0 y0 z0 — орбитальная подвижная система координат, связанная с центром масс КА C, ось Cx0 направлена по радиус-вектору КА, ось Cy0 — по направлению движения КА в плоскости орбиты; Cxtytzt — система координат, связанная с тросом, ось Cxt направлена вдоль троса (фиг. 1). Система координат Cx0y0z0 вращается с угловой скоростью орбитального движения КА Q. В простейшем случае для невозмущенной круговой орбиты имеем u = Q t, где u — угол, определяющий положение системы координат Cx0y0z0 относительно неподвижной геоцентрической системы координат, связанной с плоскостью невозмущенной орбиты, t — время.
Способы вычисления кинетической и потенциальной энергии в гравитационном поле могут быть разными. Здесь используется следующий прием. Трос представляется как совокупность n -1 материальных точек. Тогда кинетическая и потенциальная энергии системы "трос — груз" в центральном ньютоновском поле примут вид
n n n
Tc = 2 X mk (x2 + y k + zb, P = X Pk =-K I — (.2)
2 2=1 2=1 2=1 Гк
где mk = pL/(n - 1) — масса k -й точки, p — линейная плотность троса, mn = m — масса груза, xk, yk, zk — компоненты скорости k -й точки в неподвижной геоцентрической
V2 2 2 I 2 2 xk + yk + zk = \Lk + R - 2LkR cos 9 cos в — модуль радиус-
Фиг. 1
вектора к-й точки, Ьк = кЬ/и — расстояние к-й точки от базового КА, Ьи = Ь,
К = ^2 Я3 — гравитационный параметр Земли, ^ — угловая скорость вращения системы по круговой орбите, Я — радиус круговой орбиты.
Координаты точек в неподвижной геоцентрической системе координат определяются из выражений
Хк = Хок 008 И - Уок 81П И, у к = Уок 008 И + Х0к 81П И, 1к = 10к Хок = Я - Ьк 008 0 008 в, Уок =-Ьк 81п 0, Юк = Ьк 008 0 81п в
(2.3)
Используется приближенное выражение для потенциальной энергии при условии Ь/Я < 1
Рк « -ткО.1
Я2 + ЬкЯсО80ОО80 + Ьк (3ОО820ОО82Р - 1)
(2.4)
Подставляя выражения (2.2), (2.3), (2.4) в уравнения Лагранжа и дифференцируя кинетическую и потенциальную энергии, получим
(m + pL)L = (m + s(n))LFn
(m + Sf)L2e = -2(m + S^LLF^ + (m + Si[))L2F22 (2.5)
(m + S2b))L2(3 cos2 9 = -(m + S^LLF31 + (m + S2b))L2F32
где
n-1
j = I k, i = 1' 2
(и - 1Г
к=1
Fn = 92 + 2Q9cosß-Q2cos29sin 2ß + ß2cos29 + Qß sin 29 sin ß + 3Q2cos29 cos2 ß F21 = 9 +Q cos ß
F22 = 1Q2 sin 29sin2 ß -1 ß2 sin 29 + 2Qß cos2 9sin ß - 3Q2 sin 29cos2 ß
F31 = 2(3 cos2 9 + Q sin 29 sin ß
F32 = 9ß sin 29 - 2Q9 cos2 9 sin ß - 2Q2 cos2 9 sin 2ß
Кроме потенциальных сил гравитации на систему "груз—трос" действуют еще не потенциальные силы. Это сила натяжения T в точке крепления троса к базовому КА и ре-
2
активная сила Fr = pL , совершающие работу только на возможном перемещении 5L. Учитывая эти силы и вычисляя пределы
lim sf =-I-
и^го j + 1
окончательно получим
(m + pL)L = (m + PLj LF11 - T - pL2
(m + P^L) L2<3 = -2 (m + LL Fn + (m + P3L) L^ (2.6)
(m + ß^) L2ß cos2 9 = - (m + LLF31 + (m + L2F32
Из системы (2.6) при ß = ß = 0 следуют уравнения плоского движения ОТС, совпадающие с известными уравнениями [2].
3. Программа развертывания ОТС в вертикальное положение. Программа развертывания ОТС в вертикальное положение строится на основе известного закона [1], полученного для случая демпфирования поперечных колебаний в тросовой системе. Модификации этого закона использовались многими авторами [3, 5], а также в реальном
тросовом эксперименте [2]. Этот закон корректируется для случая весомого троса. Достаточно рассмотреть первое уравнение системы (2.6) при Ь = Ь = 0. Тогда, как нетрудно установить, система (2.6) будет иметь вертикальные положения равновесия 0 = 0 и 0 = п (Р = Р = 0 = Ь = 0, Ь = Ьепй ^ 0), если силу натяжения определить выражением
Т = (т
а(Ь - Ьепа) + Ь ^ + 3Ьепа
(3.1)
где а и Ь — параметры закона, Ьепй — длина троса по окончанию развертывания.
Закон выпуска троса, определяемый выражением (3.1), в отличие от аналогичных законов развертывания [1, 3], зависит от линейной плотности троса р, т.е. учитывает его весомость. Понятно, что номинальная сила натяжения в случае сравнимых масс груза и троса существенно отличается от величины силы натяжения без учета весомости троса, что и будет проиллюстрировано ниже при моделировании по более полной модели движения ОТС.
Анализ линеаризованной относительно этих положений равновесия системы показывает, что дифференциальные уравнения для отклонений по переменным р, Р отделяются от остальных уравнений системы и имеют всегда чисто мнимые собственные числа. При Ь = 0 и а > 3 все собственные числа линеаризованной системы чисто мнимые. Параметр Ь > 0 (а > 3) приводит к асимптотической устойчивости плоского движения ОТС в линеаризованной постановке, причем при достаточно малых величинах Ь все четыре собственных числа получаются комплексными. При увеличении параметра Ь существует критическое значение этого параметра Ь*, когда два собственных числа становятся вещественными и отрицательными. Дальнейшее увеличение параметра Ь не приводит к изменению качественной картины в линеаризованной системе
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.