ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2014, № 4, с. 100-110
НАВИГАЦИОННЫЕ ^^^^^^^^^^^^ СИСТЕМЫ
УДК 531.383
УПРАВЛЕНИЕ ТЕМПЕРАТУРНЫМИ ПОЛЯМИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ВОЛОКОННО-ОПТИЧЕСКИХ ГИРОСКОПАХ*
© 2014 г. В. Э. Джашитов , В. М. Панкратов
Саратов, Институт проблем точной механики и управления РАН Поступила в редакцию 21.02.14 г., после доработки 26.03.14 г.
Рассмотрены теоретические и прикладные аспекты создания реверсивной системы управления нестационарными температурными полями отдельных волоконно-оптических гироскопов и бесплатформенной инерциальной навигационной системы с этими гироскопами. Построены и исследованы математические модели тепловых процессов волоконно-оптических гироскопов и бесплатформенной инерциальной навигационной системы с активной двух-контурной реверсивной системой терморегулирования на термоэлектрических модулях Пельтье. Разработано поддерживающее программное обеспечение, выбраны параметры системы терморегулирования, проведены компьютерные численные расчеты, получены оценки функционирования рассмотренных динамических систем при сложных тепловых воздействиях.
Б01: 10.7868/80002338814040052
Введение. Волоконно-оптический гироскоп (ВОГ) — один из широко применяющихся и перспективных приборов наряду с микромеханическими, волновыми твердотельными и другими типами датчиков. Эти датчики являются неотъемлемой частью бесплатформенных инерциаль-ных навигационных систем (БИНС), предназначенных для навигации и управления широкого класса объектов.
Теория и практика ВОГ и БИНС достаточно разработаны [1—10]. Основные усилия разработчиков и исследователей направлены на существенное повышение точности приборов. Для обеспечения точностей ВОГ 0.1—0.01 град/ч с успехом применяются [1—12] пассивные способы борьбы с температурными воздействиями (термокомпенсация, специальные способы намотки волокна, тепловое шунтирование элементов, конструктивные усовершенствования катушки и др.)
Для достижения инерциальных точностей ВОГ меньше 0.01 град/ч применения только пассивных способов недостаточно. При таких точностях существенны термоупругие деформации в единицы и доли микрометров, изменения масштабного коэффициента (МК) и другие "тонкие" температурные факторы, которые заранее невозможно предусмотреть и промоделировать. Например, для достижения точности ВОГ меньше 0.01 град/ч относительная погрешность МК [1—6] должна быть меньше 0.01%. С другой стороны, современные высокоточные ВОГ должны функционировать [2, 4, 7—10, 13] в условиях жестких температурных воздействий. Температуры окружающей среды могут меняться в диапазоне (—60...+60) град и более, причем изменения могут быть нестационарными.
Для достижения инерциальных точностей меньше 0.01 град/ч кардинальным решением является применение активных методов, заключающихся в создании многоконтурных реверсивных систем терморегулирования (СТР) отдельных ВОГ (внутренний контур для стабилизации температуры его элементов) и всей БИНС (внешний контур). Активный метод регулирования температуры позволит существенно (на порядки) уменьшить в принципе любые температурные погрешности ВОГ и БИНС. Данная публикация развивает исследования [6—10, 13], направленные на существенное повышение точности и эффективности приборов, разрабатываемых в НППК (г. Пермь), НПП "Антарес", "Оптолинк", саратовском филиале и др.
Объекты исследования. БИНС с ВОГ и акселерометрами [3, 10] и системы терморегулирования отдельных ВОГ и всей БИНС.
* Работа выполнена при финансовой поддержке РФФИ (проект № 13-08-00355А).
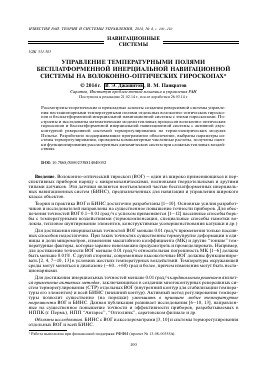
Рис. 1. Элементы и тепловые модели ВОГ (а) и БИНС (б) с СТР: ^ — тепловые связи между объемами и с
окружающей средой
Цель работы. Проработка теоретических и прикладных аспектов активного управления температурными полями ВОГ и БИНС с помощью реверсивной (нагрев-охлаждение) СТР на основе термоэлектрических модулей Пельтье [7, 11].
Для достижения цели поставлены и решены следующие задачи:
построение адекватных математических моделей тепловых процессов ВОГ и БИНС с системами терморегулирования;
Рис. 1. Окончание
аналитическое и численное исследование построенных моделей, выбор параметров СТР, получение оценок работы рассматриваемых динамических систем при сложных тепловых воздействиях.
1. Математические модели и их анализ. В основе математических моделей, предназначенных для расчета нестационарных температурных полей ВОГ, БИНС и учитывающих применение систем терморегулирования на модулях Пельтье, заложен модифицированный метод элементарных балансов [7, 12]. В соответствии с [7] ВОГ или БИНС разбиваются на конечные объемы.
Тепловая модель ВОГ с СТР (внутренний контур) с элементами, нумерацией объемов и тепловыми связями показана на рис. 1, а, где ТСМ, ТСУ, Тк, ТТ — температуры окружающей среды, корпуса и термоплаты; I — крышка; многофункциональная интегральная оптическая схема: II — крышка, III — модулятор, IV — плата, V — подставка, VI — корпус; VII — внутренний корпус; VIII — катушка для волокна; IX — волокно; X — прокладка; XI — внешний корпус; XII — промежуточное кольцо; XIII — посадочное кольцо; XIV — дно; XV — спаи модуля Пельтье; XVI — радиатор; XVII — вентилятор.
На верхней поверхности крышки I ВОГ расположен модуль Пельтье XV, рабочая поверхность (спай) которого находится в тепловом контакте через теплопроводящую пасту с крышкой I и через нее с дном XIV, посадочным кольцом XIII. На наружном спае установлен через пасту радиатор XVI с вытяжным вентилятором XVII для эффективного теплообмена между наружным спаем и средой.
\ I /
2\
©
©
И -г,©\\
-=>
Рис. 2. Общий вид модуля Пельтье и схема его полупроводникового термоэлемента: 1 -термоэлемента; 3 — холодный спай
горячие спаи; 2 — ветви
3
2
1
1
Тепловая модель БИНС с СТР (внешний контур) с основными элементами, нумерацией объемов и тепловыми связями показана на рис. 1, б, где I — корпус с ВОГ и акселерометрами; II — корпус; III — дно; IV — крышка; V — преобразователь напряжения; VI — этажерная стойка с платами; VII — спаи модуля Пельтье; VIII — радиатор; IX — вентилятор.
На крышке IV имеется модуль Пельтье, рабочий спай которого имеет тепловой контакт через теплопроводящую пасту с крышкой IV и через нее — с корпусом II, дном III, корпусом I с чувствительным элементом (ЧЭ) и др. На наружном спае установлен через пасту радиатор с вытяжным вентилятором.
Особенность БИНС (в отличие от ВОГ) в том, что внутри имеются источники тепла [3, 10]. Это акселерометры, платы на этажерной стойке VI и др. Суммарная мощность внутренних источников тепла БИНС меньше 11 Вт.
Основной алгоритм расчета температурных полей датчика или устройства, полученный на основе метода балансов [12], имеет вид [7]
Г,(} + ДО =
1
С м
Е
V,=1
+ 9и
7/(0 + —
с
м
(1.1)
Е «7,(0 + + й
V1=1
где Т^), Т^ + ДО — температуры /-го объема в настоящий и последующий моменты времени; Тс — температура среды; с — теплоемкость /-го объема; q¡j — термопроводимости между объемами /,у; — термопроводимость между /-м объемом и средой; О — мощность источников тепла или хладопроизводства; Д1 — шаг расчета; М — количество объемов, имеющих тепловой контакт с /-м объемом; N — количество объемов; / = 1, N. В коэффициентах термопроводимости q¡j учитывается теплообмен кондукцией, конвекцией и излучением.
Особенность применения алгоритма (1.1) в том, что в системе ВОГ или БИНС с СТР имеются источники тепла (холода) с управляемыми мощностями (например, для ВОГ — это определяемые далее мощности 073, 074) на спаях модуля Пельтье. Еще одна особенность состоит в том, что для управления температурными полями отдельных ВОГ и БИНС в целом предлагается использовать термоэлектрические исполнительные устройства (модули Пельтье), принцип действия которых основан на эффекте Пельтье [7, 11]. Этот эффект состоит в том, что при прохождении электрического тока через место спая двух разнородных проводников в месте их электрического контакта в зависимости от направления тока поглощается или выделяется некоторое количество тепла Пельтье. Общий вид модуля Пельтье и схема его полупроводникового термоэлемента показаны на рис. 2.
Термоэлемент представляет собой два проводника с разными видами проводимости, замкнутых на одном конце коммутационной пластиной. Когда под воздействием электрического тока
электроны перемещаются из одного проводника в другой, с более низкого на более высокий энергетический уровень, они "отнимают" часть энергии и коммутационная пластина охлаждается. При изменении направления тока электроны, переходя с более высокого на более низкий энергетический уровень, отдадут избыточную энергию и коммутационная пластина будет нагреваться. Для большего проявления эффекта Пельтье одну ветвь термоэлемента изготовляют из полупроводника с электронной проводимостью, а другую — с дырочной.
Практически если включить модуль Пельтье в схему с обратной связью по току, который будет менять свое направление в соответствии с разностью показаний термодатчика и заданной температурой, то можно, с помощью автоматически изменяемой мощности тепловыделения (хладо-производства), управлять температурой в реверсивном (нагрев — охлаждение) режиме. Следовательно, получим систему управления температурой с помощью модуля Пельтье. В этой динамической системе управляющим воздействием является автоматически изменяемая мощность 073, 074 тепловыделения (хладопроизводства) на спаях модуля Пельтье.
Модель [7, 11] модуля Пельтье (для ВОГ) имеет вид
Qn =
-sTJ(T73 + 273) +
J2 R
nm,
Q74 =
6TJ(T74 + 273) +
J 2R
nm.
(1.2)
А принятый релейно-пропорциональный закон управления температурой определяется выражением
J =
J max,
k(TR - Tz - TN),
0,
k(Ta - Tz + TN),
Jmax,
если
если
если
если
если
T - Tz > TL; TN < TR - Tz < TL;
- TN < TR - Tz < TN;
- TL < TR - Tz <-TN TK - Tz < -Tl.
(1.3)
Здесь еТ — коэффициент термоэлектродвижущей силы; J — ток; Я — электрическое сопротивление; п — количество термоэлементов в модуле Пельтье, т — количество модулей; Jmax — максимальный ток; Т£, Ту — зоны линейности и нечувствительности; 073, 074 — мощности, выделяемые на рабо
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.