ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 6, 2012
УДК 621.0, 621.8
© 2012 г. Никифоров А.Н.
ВИБРОУДАРНОЕ И БЕЗОТРЫВНОЕ ДВИЖЕНИЕ В ТОМ ЧИСЛЕ ОБКАТКА С ПРОСКАЛЬЗЫВАНИЕМ РОТОРА ПО УПРУГОЗАКРЕПЛЕННОМУ СТАТОРУ1
Представлена всережимная и многопараметрическая математическая модель ротора Джеффкотта—Лаваля с учетом условий: задевания и вибрации статора, проскальзывания и несоосности ротора в статоре. С помощью разработанной модели определяются типовые траектории и особенности движения ротора/статора, а также критические величины несоосности и коэффициента трения между ними, при которых резко ухудшаются вибрационные характеристики системы "ротор-статор".
В научно-технической литературе имеется много публикаций, затрагивающих моделирование и динамический анализ контактного взаимодействия симметричного, однодискового, гибкого ротора (ротора Джеффкотта—Лаваля) с жестким и смещающимся статором, например [1—3]. Это связано с тем, что в роторных машинах, как правило, имеются жестко и(или) упругозакрепленные на статоре элементы с малым (до ротора) рабочим зазором: подшипники скольжения, уплотнительные кольца и втулки-ограничители. Отсюда возникает потенциальная опасность задевания ротором статорных элементов со стремительным их истиранием и даже с катастрофическим [4, 5] разрушением.
Однако существующие расчетные модели разработаны для определенных (частных) случаев поведения ротора. С их помощью можно исследовать либо безударные и виброударные, либо безотрывные движения ротора по статору, такие как прямое синхронное скольжение и обкатку, в том числе с эффектом проскальзывания, что в англоязычных научных трудах широко обсуждается как "backward rolling with slipping". Другими словами, отсутствует общая математическая модель, пригодная для изучения всех этих режимов движения ротора.
В работе [6] сделана сравнительно удачная попытка построения многорежимной расчетной модели "ротор Джеффкотта—Лаваля — статор". Недостатки предложенной модели состоят в том, что не рассмотрена возможность проскальзывания ротора при возникновении его обкатки по статору, а также не учтены важные с практической точки зрения эксплуатационные факторы: нагрузка от веса ротора, имеющая место при его горизонтальной установке; крутящий момент на роторе, действующий при его разгоне-торможении; линейная и угловая податливость статорного элемента как твердого тела, связанная с его упругим закреплением; несоосность ротора и статора в состоянии статического равновесия вследствие неизбежных неточностей изготовления и сборки.
Обобщенная математическая модель ротора Джеффкотта—Лаваля с учетом движения статора. Общую всережимную и многопараметрическую математическую модель "симметричный, однодисковый, гибкий ротор — упругозакрепленный статор" можно
1Работа выполнена при финансовой поддержке РФФИ в рамках научных проектов № 10-08-00500-а и № 12-01-31086 мол_а.
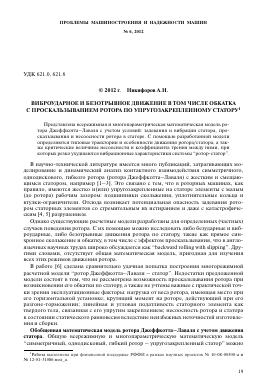
Рис. 1
построить с использованием вращающейся с ротором (точнее, с вектором его неуравновешенности RG) системы координат Ouvz (рис. 1). Тогда в качестве обобщенных координат достаточно взять радиальные перемещения ротора q1, q2 и угол его поворота q3, а также соответствующие линейные смещения статора q4, q5 и его угловое перемещение q6. Это обусловлено особенностями полярной системы координат при определении положения центра ротора R и статорной поверхности S.
Вектор абсолютной скорости центра R определяется суммой векторов ir — переносной скорости центра ротора во вращающейся системе координат и rRq 3 — относительной скорости центра ротора, обусловленной вращением системы Ouv вокруг начала координат О. То же самое относится и к центру S
иr = Гд + r^q з = <?iu + ¿I2V + qqv - ?2</зи, (1
Us = rs + rRq3 = ¿4u + q/зи + qqu - qsq/ju '
где u и и — единичные векторы.
Движение ротора (статора) во вращающейся системе координат является криволинейно поступательным (переносным), поэтому все точки ротора имеют одинаковую скорость движения относительно начала координат О в системе Ouv. Это позволяет найти важные, с точки зрения роторной динамики, скорости точек G и C (т.О располагается на линии параллельной оси ротора и проходящей через его центр масс, а т. С принадлежит линии контакта)
uG = rR + OG х q3 = rR + rRq3 + RG x q3 = ¿ца + q2и + qqu - q2q3u + aq3u,
uc = rR + OG x q3 = rR + rRq3 + RG x q3 = q^ + q2u + q1q3u - q2q3u + + (r cos a) q3u - (r sin a) q3u,
где a = RG и r = RC — дисбаланс и радиус ротора.
Из (1) легко найти скалярные величины, т.е. проекции абсолютных скоростей центров R, G, S и точки C
иди = qi - ¿2¿3, иGu = qi - ¿2¿3, иди = ¿2 + ¿i¿3, ugu = ¿2 + (qi + a) ¿13,
USu = ¿4 - ¿5¿13, Ucu = ¿i - (2 + r sin a) ¿з, (2)
USu = ¿5 + ¿4¿3, Ucu = ¿2 + (¿i + r COS a) ¿3.
Уравнения движения для любой упругой колебательной системы целесообразно выводить, применяя метод Лагранжа. Удобство этого способа в том, что число состав-
ленных дифференциальных уравнений движения равно числу степеней свободы, т.е. числу обобщенных координат. Уравнения движения для каждой из обобщенных координат получаются по Лагранжу из дифференцирования кинетической энергии Т
Л Л
— 1-— = й, (3)
) %
где в правой части стоит соответствующая ¡-й координате внешняя обобщенная сила Q¡, которую в случае необходимости можно найти как производную виртуальной
работы Ж: Qi = . Важно отметить то, что в роторных системах часто бывает проще дд1
сначала определить действующие в системе силы и установить, каким перемещениям они соответствуют, а затем разыскивать выражения кинетической энергии и виртуальной работы.
Кинетическая энергия твердого тела определяется как сумма кинетической энергии его поступательного движения (вместе с центром масс) и кинетической энергии его вращательного движения (вокруг центра масс). Для рассматриваемой системы выражение кинетической энергии складывается из кинетических энергий привода, ротора и статора
т = 2 J о^о2 + 2 ШК (р1и + и1У) +1 /6</з2 +1 т8 (р]и + ) +1 Jsql, (4)
где шк — масса и — полярный (осевой) момент инерции ротора; — момент
инерции ротора относительно оси, параллельной оси ротора и проходящей через его центр масс О; — масса и — полярный момент инерции статора; 10 — угловая скорость и /0 — полярный момент инерции привода.
Подстановка (2) в (4) дает кинетическую энергию системы, выраженную через принятые обобщенные координаты (здесь и далее вместо параметра используется /д)
Т = 2 Jо1о + 2 тя[( - 121з)2 + (I2 + ( + а) ¿13)2] + 2 J+
+ 2 т5[(4 - д5дз)2 + (( + )2] + 2 Jsq¡. Отсюда можно найти следующие производные кинетической энергии:
ТI I = тк (11 - 121з - Ыз), дТ = тцЦз + (( + а)2],
Л ) дql
ТI дТ I = тк [(2 + ( + а) qз + Ц ], дТ = тк(-Ц + 121з2), Л\dci2 ) дд2
Л(дТI 2 2
— I — I = JRlз + тд[12Из + 212121 з -1112 + (11 + а)12 + (11 + а) Iз + 2 (11 + а) Ц, ] +
Л уд1з)
+ тз(Цз152 + 2<1з15<15 - Ц415 + 1415 + 1з14 + 21з14?4),
ТI дТ I = тз ((4 - 1511 з - 151 з) , дТ = тз(15(1 з + 141 з2), ¿г Ур14) д14
ТI дТ I = тз ((5 + 141з + Шз), дТ = тзН^з + 15(?з), ¿г ^5(5) д(5
Л 1^516 ) ^6, Л (дТ )
Подстановка этих производных в уравнения Лагранжа (3) позволяет составить уравнения движения рассматриваемой системы
mR[q 1 - 3 - 2q3 - ( + a) q32] = Qb mR[q2 + ( + a)q3 + 2qxq3 - q2q\\ = Q2,
[JR + mR(( + a) + qj) + ms(qj + q^2)]^3 + mR [( + a) $2 - qq +
+ 2 ($i + a) qq + ^^] + ms (5 - q^s + 2Ы2С12 + 2$3$5$з) = Q3, (5)
ms(^2 - $3$з - 2$3$ъ - $ъ$2) = Q2, msq + ^ + - $3$з) = Qs, J s$ 6 = Q6, J о$ о = Qo-
Обобщенные силы/моменты 0,- для соответствующих линейных и угловых перемещений qs определяются следующими выражениями (рис. 2):
Qi = -£r$i - dRVRU + mRgcosq3 - F„cosa + FTsina,
Q2 = -^r$2 - dRVRU - mRgsinq3 - F„sina - FTcosa,
Q3 = dRVRUq2 - dRURuqi - mRg [( + a) sinq3 + $2cos$3] - Mc + Hr ( - q3), (6)
Q2 = -ksq2 - dsUsu + Fncosa - FTsina, Q5 = -k5qs - dsUsv + F„sina + FTcosa, Q6 = Mc - Hs$6 - dsq6, Qo = Mo - Hr (qo - q3) -
Из (6) видно, что суммируются важные для практики статические и динамические нагрузки. Силы поперечной упругости ротора kRq1, kRq2 и статора kSq4, kSq5, где kR = 48EI/l3 — жесткость ротора на изгиб, kS — коэффициент упругого сопротивления (жесткость) крепления статора в радиальном направлении. Силы внешнего трения, пропорциональные абсолютным скоростям (2) ротора dRuRu, dRvRu и статора dsusu, dsusu, где dR — коэффициент вязкого сопротивления "фиктивного" из-за защемления опор [7] и (или) специального демпфера в середине пролета ротора, dS — коэффициент вязкого сопротивления крепления статора в радиальном направлении. Сила тяжести ротора mRg. Нормальная Fn и касательная FT составляющие, а также момент MC контактной силы, действующие на ротор при выборе радиального зазора 8, при этом на статор действуют такие же контактные нагрузки, но другого знака. Крутящий момент привода M0. Моменты сил угловой упругости вала +kR (q0 - q3) [8], где kR ~ 1,6EI/l — жесткость вала ротора на кручение на участке между диском и опорой со стороны
привода [7]. Момент сил угловой упругости статора k:Sq6, где kS — жесткость крепления статора в окружном направлении. Момент сил внешнего трения, пропорциональный угловой скорости статора dSq6, где dS — коэффициент вязкого сопротивления крепления статора в окружном направлении.
На практике M0 зависит от угловой скорости привода qo [9]. Эта зависимость обычно задается в виде совместной характеристики двигателя (крутящий момент M1) и ротора (момент сопротивления, связанный с рабочей нагрузкой M2)
Mо = Mi - M2 = Mn (2 - qo/) - Mn (qo/)2, (7)
где Mn, — номинальные значения крутящего момента и угловой скорости.
Исходя из рис. 2, момент контактной силы вокруг начала отсчета О определяется формулой
-MC = (Fn cos a- FT sin a) (q2 + r sin a) - (Fn sin a + FT cos a) (qi + r cos a).
Тригонометрические множители составляющих контактной силы Fn и FT представляют собой отношения вида
cos a = Urs, sin a = Urs, где uRS = qi - q4, Urs = q2 - qs, R = ^Urs+Urs ■ (8) rRs rRs
При этом, если в состоянии статического равновесия имеются начальные поперечные отклонения центров ротора и статора от главной оси симметрии z (от т.О), то их можно учесть путем рассмо
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.