ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА
Том 74. Вып. 4, 2010
УДК 531.36:534.1
© 2010 г. В. С. Асланов
ВЛИЯНИЕ УПРУГОСТИ ОРБИТАЛЬНОЙ ТРОСОВОЙ СИСТЕМЫ НА КОЛЕБАНИЯ СПУТНИКА
Рассматривается космическая тросовая система, включающая спутник (твердое тело), весомый упругий трос и концевой груз. С помощью уравнения Лагранжа второго рода получена математическая модель, которая позволяет исследовать плоское поступательное движение центров масс элементов системы и вращательное движение спутника и троса. Показано, что полученные при допущении о независимости движения центра масс системы от относительного движения ее элементов, уравнения движения для новой независимой переменной — угла истинной аномалии, являются обобщением известных математических моделей. Исследовано влияние упругости троса на угловые колебания троса и спутника. Построенная модель может быть использована как для анализа процесса развертывания тросовой системы, так и для изучения совместного поведения спутника и троса вокруг собственных центров масс.
В большинстве известных математических моделей космических тросовых систем [1] спутник рассматривается как материальная точка, что не позволяет использовать их для анализа движения самого спутника как твердого тела. При попытках изучения влияния троса на поведение спутника [2—4] использовались частные математические модели, которые не позволяют в более общей постановке решить задачу о влиянии сил упругости и других сил на поведение троса и спутника.
1. Постановка задачи. Будем полагать, что спутник представляет собой твердое тело, на которое действуют гравитационная сила, гравитационный момент и момент за счет силы натяжения троса. В динамическом смысле спутник определяется главными моментами инерции и центром масс, а точка выпуска троса не совпадает с центром масс спутника. При выводе уравнений движения будем пренебрегать гибкостью упругого троса, масса которого изменяется прямо пропорционально длине. Концевой груз будем представлять как материальную точку.
Для построения математической модели будем использовать уравнения Лагранжа второго рода, учитывая как потенциальные, так и непотенциальные силы. Будем изучать движение системы в плоскости орбиты.
Решим несколько задач. Сначала, не вводя ограничения на соотношение геометрических размеров спутника и троса и считая упругий трос весомым, получим уравнения движения тросовой системы, не разрешенные явным образом относительно обобщенных координат. При допущении, что длина троса значительно превышает геометрические размеры спутника и невесомый упругий трос выпущен полностью, будут построены уравнения движении, разрешенные явным образом относительно обобщенных координат. В предположении о независимости движения центра масс системы от относительного движения ее элементов, уравнения движения будут записаны для новой независимой переменной — угла истинной аномалии, что позволит сократить систему уравнений движения до трех уравнений второго порядка. Будет показано, что полу-
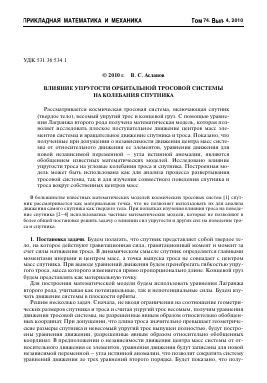
Фиг. 1
ченные уравнения обобщают ранее известные уравнения движения. Для уравнения продольных колебаний троса в случае, когда трос совпадает с местной вертикалью, будет найдено приближенное аналитическое решение. В последней части статьи будет изучено влияние упругих свойств троса на угловое поведение троса и спутника и показан хаотический характер этого влияния.
2. Уравнения Лагранжа второго рода. Тросовая система состоит из спутника массой m0 с центром масс в точке D0, троса массой m1(/) = ( — длина, р — плотность, — площадь поперечного сечения троса) с центром масс в точке D1 и концевого груза массой m2 в точке D2 (фиг. 1). Полная масса системы
т = т 0 + т1 + т2 = т°0 + т2 (2.1)
о о
где т0 — начальная масса спутника, m0 = т0 — m1 — текущая масса спутника.
Кинетическая энергия тросовой системы, согласно теореме Кёнига, состоит из кинетической энергии центра масса TC и кинетической энергии тел и материальных точек системы в поступательно движущейся системе координат O1x1y1 с началом в центре масс (фиг. 1)
Т = Тс + То + Тх + Т2 (2.2)
где T¡ ( = 0, 1, 2) — кинетическая энергия элементов системы в системе координат O1x1y1. В качестве обобщенных координат выберем
= а, д2 = ф, д3 = I, д4 = 0, д5 = г (2.3)
где г = OO1 — расстояние между центром планеты и центром масс системы O1 (фиг. 1), l = PD2 — длина троса, 9 — угол истинной аномалии центра масс системы (система ко-
ординат Оху располагается в плоскости орбиты, ось Ох направлена на перигей), ф — угол отклонения троса относительно линии ОД1, а — угол отклонения оси спутника относительно линии ОД0.
Кинетическая энергия центра масс системы равна
Тс = 1 т (г2 + г202) (2.4)
Кинетические энергии относительного движения спутника, троса и груза определяются соответственно в виде
То = 2 то^0г + 1с Т1 = 2 т1 У\г + 1 , Т2 = 2; т2 (2.5)
где — скорость точки Д в системе координат О^х:у: (' = 0, 1, 2), ю0 и ю1 — угловые скорости спутника и троса, С — главный момент инерции спутника относительно оси Д0г0 в системе координат Д0х0у0г0, С1 = ш112/12 — момент инерации троса относительно его центра масс. Для определения кинетической энергии тросовой системы (2.2) через обобщенные координаты (2.3), введем в рассмотрение радиусы-векторы центра масс системы О1 и центров масс отдельных ее элементов Д в полярных координатах
г = OOl = (г, 0), Г1 = ODi = (г, 0,), I = 0, 1, 2 (2.6)
а также векторы
1 = PD2 = (I, Ф), А = DoP = (А, а) (2.7)
В силу определения центра масс системы и геометрического расположения точек (фиг. 1) векторы (2.6) и (2.7) связаны соотношениями
2
= ^ m;Tj, г, = Г! + А + 1, г 2 = Г! + А + l
mг
i = 0
Отсюда следуют формулы, устанавливающие связь между координатами точек Dt и обобщенными координатами (2.3)
m, + m2 . m,/2 + m2, m0 . m0 + m2,
г0 = г----2 А----21, г, = г + — А + -21 (2.8)
m m m 2m
m0. m0 + m,/2,
г2 = г + —0 А + —-—1 (2.9)
mm
Из формул (2.8), (2.9) можно найти положение точек Di в системе координат O1x1y1, связанной с центром масс тросовой системы:
р. = г.- г, i = 0, 1, 2
а следовательно. и скорости этих точек
Vir = р i (2.10)
Угловые скорости спутника и троса, входящие в первые две формулы (2.5), таковы: ю0 = а + 00, ю, = ф + 0i (2.11)
В свою очередь, производные 0о и 0i могут быть получены с помощью проекций векторов (2.8) на оси системы O1x1y1 (фиг. 1). Имеем
[cos| [cos| mi + m2. [cos| mi/2 + ,[cos|
гооÍ . ^0о = H , ¡>0 - -1-2Л-j r(0o + a) - —-21i . f(6i - Ф)
I sin I I sin I m I sin I m I sin I
I cos I I cos I m0 I cos I m0 - m2.1 cos I
ri\ . ¡0i = H ¡0 + —0Л^ ¡(0o + a) + -0--21\ ¡(0i + ф)
I sin J I sin J m I sin J 2 m [ sin J
Окончательно с помощью формул (2.4), (2.5), (2.10), (2.11) запишем кинетическую энергию тросовой системы (2.2) как функцию обобщенных координат (2.3) и их скоростей в виде
2
T = 2- m( r2 + r0) + i- £ m¡p2 + 2- [ Co(a + 0o )2 + С(ф + 0i)2 ] (2.12)
i = 0
Потенциальная энергия системы равна сумме потенциалов центрального поля силы тяжести [5] и потенциальной энергии силы упругости троса WE
^mn 3ц. . D4 2 т„ цmi W0 = - -—0 + ---(A - B)cos a, Wi = --—-
r0 2 Го ri
WE = 2 (l - I0 )2
( ,2 1 , l 2 i +--cos ф
^ 8ri
, w2 = - vm
r2
где ц — гравитационный параметр, A и B — главные моменты инерции в связанной со спутником системе координат D0x0y0z0 относительно осей D0x0 и D0y0, c = E/l0 — коэффициент упругости, l0 — длина ненапряженного троса, E — модуль упругости. Объединяя эти выражения, получим формулу для потенциальной энергии системы
2 ,2 W = - цУ m + ^(A - B)cos2a - Щ-cos2Ф + -(I- l0)2 (2.13)
i = 0r 2r0 8r? 2
Учитывая соотношения (2.12) и (2.13), запишем выражение для лагранжиана
2
L = T- W = m(r2 + r202) + !У mp2 + [Co(a + 00)2 + С^ф + 0!)2] +
2 ' = 0 2 (2.14)
, ^ m m 2 umxI 2 C,. ..2
+ u У —---- (A - B) cos a + -—1-cos ф - - (I - l0)
r, 2 r3 8r 2
i = 0 i 2 r0 8rl
Уравнения Лагранжа второго рода имеют вид
^ - It = G, j = l, 2,-, 5 (2.15)
aio qy dqj
где ql = a, q2 = ф, q3 = l, q4 = 9, q5 = r, Qj — непотенциальные силы, в том числе силы управления, демпфирования, аэродинамические и иные.
Отметим, что лагранжиан (2.14) зависит от обобщенных координат q¡ и обобщенных скоростей ¿¡j в силу соотношений (2.4)—(2.13), хотя и в неявном виде.
3. Уравнения Лагранжа второго рода для развернутой тросовой системы. Можно существенно упростить лагранжиан (2.14), если ввести некоторые допущения. Во-первых, пусть трос развернут полностью. Во-вторых, длина троса l значительно превышает плечо силы натяжения троса А:
А// < 1 (3.1)
(в эксперименте YES2 [1] трос имел длину l порядка 30 км, а плечо силы натяжения А — несколько метров). В-третьих, длина троса во много раз меньше расстояния от центра масс системы до центра Земли, поэтому будем считать, что 90 = 9: = 9. В-четвертых, массой троса будем пренебрегать. В этом случае масса тросовой системы определяется соотношением
m = m 0 + m2 (3.2)
где m0 и m2 — постоянные величины.
В силу отношения (3.1) можно считать, что центр масс всей системы лежит на линии PD2 (фиг. 1). Для определения кинетической энергии спутника T0 (первое равенство (2.5)) сначала найдем проекции точки D0 в поступательно движущейся системе координат O¡x¡y¡
x0 = m2 / cos (0 + m) + А cos (0 + а), 0 _ _ (3.3)
y0 = m2/sin (0 + ф) + А sin (0 + а); m2 = m2/m
Очевидно, что скорость точки D0 в системе координат O¡x¡y¡ равна
V0r = (X2 + У2 )1/2 (3.4)
Подставляя производные по времени от координат (3.3) в равенство (3.4), а также имея в виду первое соотношение (2.11), запишем выражение для кинетической энергии спутника (первое равенство (2.5)) следующим образом:
mm _2 «2 _2 2 * 2 _ • •
T0 = — [m21 + m2/ (ф + 0) + 2Аm2/(а + 0) sin(ф - а) +
_ (3.5)
+ 2Аm2/(ф + (3)(а + 0))cos(ф - а)] + --- (а + (3) ; С0 = C + m0А2
Учитывая, что расстояние между центром масс системы и точкой D2 равно m0/, для кинетической энергии относительного движения концевого груза D2, определяемой последним равенством (2.5), получим — 2
T2 = ^m-0 [ /2(ф + 0 )2 + ^ ] (3.6)
Окончательно с помощью выражений (2.2), (2.4), (3.5) и (3.6) кинетическую энергию системы запишем следующим обр
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.