ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 3, 2013
УДК 621.01.531.8
© 2013 г. Сергеев В.И.
ВОПРОСЫ ИНСТРУМЕНТАЛЬНОЙ ТОЧНОСТИ НЕЛИНЕЙНЫХ ДИНАМИЧЕСКИХ СИСТЕМ
Рассмотрена постановка и методология решения одного класса задач в области исследования точности электромеханических цепей приборов с параметрами нелинейных звеньев, изменяющимися в процессе решения задачи в рамках одной общей формулировки. Особое внимание обращено на подход к определению устойчивости движения. Приведен пример в достаточно общей постановке задачи при детерминированном и стохастическом подходе к ее решению.
В задачах теории точности обычно рассматривается дополнительное движение системы, являющееся следствием производственных погрешностей, возникающих в условиях изготовления и сборки отдельных звеньев электромеханических цепей. Поэтому модули подобного движения должны быть соизмеримы с величинами технологических допусков на изготовление отдельных звеньев. Этим определяются их абсолютные величины и тем самым характер дополнительного движения и показатели точности последнего. При этом переходный процесс обычно не рассматривается [1—4], т.е. предполагается, что параметры системы обеспечивают ее устойчивость.
В общем случае при проектировании и совершенствовании существующих конструкций автоматических приборов, оценка устойчивости является одной из первостепенных задач. Отмеченное относится к случаям, при которых уравнения движения включают нелинейные звенья, параметры которых изменяются в процессе решения разных вариантов одной задачи в общей формулировке.
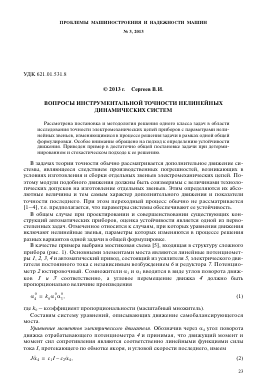
В качестве примера выбрана мостиковая схема [5], входящая в структуру сложного прибора (рис. 1). Основными элементами моста являются линейные потенциометры 1, 2, 3, 4 и автоматический привод, состоящий из усилителя 5, электрического двигателя постоянного тока с независимым возбуждением 6 и редуктора 7. Потенциометр 2 юстировочный. Сомножители а: и а3 вводятся в виде углов поворота движков 1' и 3' соответственно, а угловое перемещение движка 4 должно быть пропорционально величине произведения
ООО
а4 = к0 а: а3, (1)
где ^ — коэффициент пропорциональности (масштабный множитель).
Составим систему уравнений, описывающих движение самобалансирующегося моста.
Уравнение моментов электрического двигателя. Обозначив через а4 угол поворота движка отрабатывающего потенциометра 4 и принимая, что движущий момент и момент сил сопротивления являются соответственно линейными функциями силы тока I, протекающего по обмотке якоря, и угловой скорости последнего, имеем
Iа4 = с11 - с2а4, (2)
Рис. 1
где J — приведенный момент инерции системы; c1 и ^ — коэффициенты пропорциональности.
Преобразуя уравнение (2), получим
(Т1р + 1)ра4 = кх1,
(3)
т * 1 С1
где Т = — , к1 = - , р =
йг
Уравнение цепи усилителя. При равенстве омических сопротивлений потенциометров моста напряжение в его диагонали запишем так
и* = ип
а4 — а4
(к0а3 + 1 )(а° + а4) Тогда напряжение на выходе усилителя будет
с3и *,
(4)
(5)
где c3 — коэффициент усиления усилителя.
Уравнение цепи якоря двигателя. Обозначим соответственно через L и R индуктивность и омическое сопротивление якоря, а через ^ и c0 соответственно коэффициент пропорциональности и передаточное отношение редуктора, запишем уравнение цепи якоря в виде
(Ьр + Я)1 = и - —ра4.
с
(6)
Используя уравнения (3)—(6), получим дифференциальное уравнение, при помощи которого описывается поведение рассматриваемой системы
3 2
тхтр + (Т. + т2 )р2 + (1 + к1 кз )р +
к1к2
00 (к0а3 + 1 )(а1 + а4).
а
к1 к2
00 (к0а3 + 1 )(а1 + а4)
0
а4,
Ь с3и0 сн
где Т2 = Ь , к2 = -3-0 , к3 = .
2 Я 2 Я 3 с0Я
2
2
0
Уравнение (7) нелинейно вследствие того, что в схеме моста напряжение на выходе усилителя зависит нелинейным образом от угла рассогласования. В общем случае нелинейность в (7) не может рассматриваться как малая. Поэтому для решения вопроса об устойчивости выбранной схемы самобалансирующегося моста воспользуемся вторым методом Ляпунова [6, 7]. Для этой цели введем новую переменную
_ о
¿, — а4 — а4 .
С учетом (8) приведем (7) к виду
3 2
ТТР + (Т1 + Т2 )р2 + (1 + к, кз )р +
кх к2
п 0 о о ч
(к0а3 + 1 )(а1 + а4 + г).
г — 0.
(8)
(9)
Представим (9) в виде следующей системы уравнений:
г1 — ^ ¿2 — ¿3, ¿3 — - Мгъ - Щ -
с
Л + г,
¿1,
(10)
где
М
Т + Т 2 Т-1 Т-2 ,
N
1 + к1 к3 Т1 Т2 ,
с
к1 к2
Л
(коаз + 1) Т1 Т2
Систему уравнений (10) перепишем следующим образом: ¿1 — Z2, ¿¿2 — ¿з, ¿¿з — - Мгз- ^2- ^¿1,
оо а1 + а4,
¿1 •
(11)
где ^ — некоторый постоянный коэффициент.
Анализ устойчивости системы проведем при помощи функций Ляпунова
У( ¿1, ¿2, ¿3) — Я (12)
и представим (12) в квадратичной форме
У — 2(B11¿'2 + В22¿2 + B33¿3) - ^¿Л - B13¿1¿3 - B23¿2¿3• (13)
Значения коэффициентов B можно определить так, чтобы квадратичная форма (13) была положительной при любых значениях переменных z¡, z2, z3, за исключением
п йУ
z1 = z2 = z3 = 0, а ее полная производная — , выраженная через систему уравне-
йг
ний (11), была бы отрицательной при любых значениях переменных, отличных от ну-
йУ
ля. При Zl = z2 = z3 = 0 функции V и — должны одновременно обращаться в нуль.
йг
Для решения поставленной задачи можно задаться определенно-отрицательной
222
квадратичной формой вида U = —(¿1 + ¿2 + ¿3).
Нелинейная система (10) будет устойчивой при следующих условиях. Если для ее линейного приближения (11) можно построить функцию Ляпунова V (12), то полная йУ
производная которой
йг
U, выраженная через параметры системы (11), является
определенно-отрицательной функцией при любом значении h0, удовлетворяющем неравенству
к2 < Но < Н1.
(14)
Если область возможных значений функции —— ограничена прямыми h1z1 и h2z1, то
Л + —1
с—1
к2—1 < 77— < к1—1- (15)
л + —1
При удовлетворении условий (14) и (15) функция V будет функцией Ляпунова не только для системы (11), но и для системы (10).
Перейдем к определению коэффициентов B. Для этой цели воспользуемся соотношением
л йУ д¥. дУ. дУ ■
и = 17 = —1 + —2 + ——з • (16)
йг д—1 д—2 д—3
Принимая во внимание (11) и (13) представим (16) в виде
2 2 2 2 2 2 -(— 1 + —2 + —3 ) = В11—1—2 - В12—2 - В13—2—3 + В22—2—3 - В12—1—3 - В23—3 - МВ33—3 +
+ МВ13—1—3 + мв23—2—3 - ЫВ33—2—3 + ЫВ13—1—3 + ЫВ23—^ + (17)
2
+ ¿0В13—1 - к0В33—1—3 + к0В23—1—2^
Потребуем, чтобы равенство (17) выполнялось тождественно. Тогда его можно представить в виде системы алгебраических уравнений, из которых определяются искомые значения всех коэффициентов B
2 2 2 2 = - 2 = к 02 + Ы^2 + М2Ы в = ( к 0 + М)2 - к,М
13 к 0, 12 к 0 ( Н0 - МЫ) , 23 к 0 ( к0 - МЫ) ,
3 2 2 2
в = - к0 - к 0 М- н 0 М + Ык0 - Ы М (18)
11 к 0 ( к 0 - МЫ) ,
= к 0 + к0( N + М ) + к0 N + Мк02 + М3 = (1 + Ы) к0 + М
22 = к 0 ( к 0 - МЫ) , 33 = - к0 ( к0 - МЫ) '
Если подставить найденные значения коэффициентов B в квадратичную форму V, то полная производная — , выраженная через систему уравнений (11), будет величи-
йг
ной отрицательной.
Теперь зафиксируем найденные значения коэффициентов B и рассмотрим следующую систему уравнений:
—1 = —2, —2 = —3, —3 = - М— 3 - Ы—2 - к—1, (19)
в которой h = h0 + Дк.
йУ
Определим — , положив эту производную равной квадратичной форме ~П3
йг
йУ 2 2 2
— = = -(5ц—1 + $22—2 + ¿33—3 + 2$12—1—2 + 2^13—1—3 + 2$23—2—3), (20)
где коэффициенты ^ определяются из условия л дУ. д У. дУ ■
и5 = — ——1 + — ——2 + -Г- ——3. (21)
д—1 д—2 д—3
к0 АН1 Й1 Дк2 к2 С ¿1 В11
70 2,3 72,3 -2,2 67,8 578,4 0,54 61,21
125 0,63 125,63 -0,62 124,38 1005 0,08 399,98
В22 В33 B12 В13 В23 ¿2 ¿3 Л
13,49 0,14 9,90 -0,01 —0,87 -0,65 3,98 7,04
47,07 0,31 —38,99 -0,01 —3,20 -0,22 2,29 0,92
В (21) значения ¿1, ¿2 и ¿3, входящие в (20), задаются системой (19). Найденные аналогично изложенному коэффициенты имеют следующие значения:
А к А к
^11 — 1 - АkBlз, ^22 — 1, Sзз - 1, ^ — - — B23, $13 — B33, $23 — о. (22)
Форма (21) является определенно-отрицательной, если
$11 > о, $11$22 - > 0, $33($11 $22 - ) - $22$В > о. (23)
Из совместного рассмотрения (22) и (23) имеем
2 4B13 4 Ак +-13— Ак--4-< 0. (24)
2 2 2 2
B33 + B23 B33 + B23
Неравенство (24) удовлетворяется, если
Ак2 < Ак < Ак1, (25)
где
22 Ак — , 2ко2(ко - М^2
к0[( к02 + к0М + М2 )2 + (к0 + Nк0 + М) 2 ] (26)
2к0(к0 - MN) I 2 2 Т2 2
04 0 ; ^(к0 - MN)2 + (к02 + к0М + М ) + (к0 + Nк0 + М)
(к0 + к0М + М2 )2 + (к0 + Nк0 + М) 2 Из совместного рассмотрения (14) и (25) получим
к1 — к0 + Ак > к0 > к0 + Ак2 — к2. (27)
Основываясь на изложенном, перейдем к анализу устойчивости самобалансирующегося моста. Для этой цели выберем исполнительный двигатель типа СЛ-321, редуктор с передаточным отношением с0 = 0,01 и следующие значения параметров решаемой при помощи моста задачи (1): к0 — 1, а0 = 0,5п, а0 = 0,25п.
п
Выявим вид функциональных зависимостей Ак^к^ и Ак2(к0), для чего воспользуемся формулой (26). Характерные результаты расчета приведены в таблице для значений к0 = 70,125.
Так как касательная к кривой у = Cz1/(D + z1) имеет значения у' — 0 = C/D и у' — „ = 0, то условие (15) выполняется для всех значений z1, если в (27) у = Cz1/(D + z1)
будет лежать между прямыми h1z1 и h2z1 только в ограниченной области значений z < z1. В этом случае исследуемая нелинейная система будет устойчива в области, которую составит совокупность точек, внутренних по отношению к поверхности эллипсоида
V = const, касающегося плоскости Z: = const. Соответствующие результаты расчета приведены в таблице для значений h0 = 70,125.
Выделим в семействе (13) эллипсоиды, касающиеся плоскостей Z: = const. Для этого в общем уравнении плоскости, касающейся в точке с координатами Z: , Z2 , Z3 эллипсоида V(zb z2, z3) = const, т.е. в уравнении
(Zi - Zi )(f-) + (z2 - Z2 )(jV + (Z3 - Z3 )(|£) = 0, (28)
VdV Zi, Z2, Z3 VdZ2 Z„ Z2, Z3 Vdz/ Z„ Z2, Z3
положим Zi — Z: = 0, выделив этим семейство касательных плоскостей, перпендикулярных оси z1.
Из (28) следует, что
dV = 0, Г dV = 0. (29)
Zi, Z2, Z3 Гд V Zi, Z2, Z3
Таким образом, уравнения (29) принимают вид
B22Z2 - B23Z3 = B12Z1, — B23Z2 + B33Z3 = B13Z1 •
Решая их, получаем две другие координаты точки касан
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.