ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА
Том 77. Вып. 3, 2013
УДК 531.36:534.1
© 2013 г. О. Ю. Макаренков
АСИМПТОТИЧЕСКАЯ УСТОЙЧИВОСТЬ КОЛЕБАНИЙ ДВУХМАССНОГО РЕЗОНАНСНОГО ГРОХОТА
Доказывается асимптотическая устойчивость периодических колебаний в модели двухмассного резонансного грохота с односторонним ограничителем без зазора в предположении, что линейная порождающая система допускает колебания с частотами ю и 2ю и частота внешнего двигателя совпадает с ю. Такая постановка соответствует широко используемому режиму работы грохота — резонансу. Наличие ограничителя приводит к недифференцируемости вдоль некоторых плоскостей правых частей соответствующих дифференциальных уравнений. Используется принцип усреднения, применимость которого в рассматриваемом случае была обоснована ранее. Доказано, что найденный резонансный режим субгармонический.
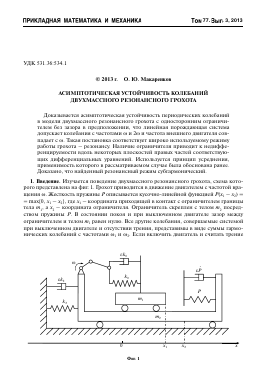
1. Введение. Изучается поведение двухмассного резонансного грохота, схема которого представлена на фиг. 1. Грохот приводится в движение двигателем с частотой вращения ю. Жесткость пружины Р описывается кусочно-линейной функцией Р(х1 — х2) = = тах{0, х1 — х2}, где х1 — координата приходящей в контакт с ограничителем границы тела т1, а х2 — координата ограничителя. Ограничитель скреплен с телом т2 посредством пружины Р. В состоянии покоя и при выключенном двигателе зазор между ограничителем и телом т1 равен нулю. Все другие колебания, совершаемые системой при выключенном двигателе и отсутствии трения, представимы в виде суммы гармонических колебаний с частотами ю1 и ю2. Если включить двигатель и считать трение
Фиг. 1
малым, то при приближении частоты ю к значению ю: или ю2 в системе возникает резонанс. Было замечено ([1], с. 137), что один из этих резонансов ю = ю2 приводит к субгармоническим колебаниям и что причина субгармоничности — наличие упругого ограничителя. Для обоснования этого утверждения был использован [1] так называемый метод эквивалентной линеаризации (не вполне строгий).
Ниже показывается, что при формальном требовании малости жесткости ограничителя указанный резонанс может быть строго изучен методом усреднения и что асимптотическая устойчивость соответствующих колебаний может быть установлена при помощи негладкого аналога второй теоремы Боголюбова [2].
В разд. 2 разрабатывается способ приведения к стандартной форме принципа усреднения системы дифференциальных уравнений, описывающих наиболее общую механическую систему двух связанных тел. В разд. 3 вводятся условия применимости негладкого аналога второй теоремы Боголюбова и полученный способ применяется к системе дифференциальных уравнений, описывающих модель грохота, показанную на фиг. 1, в которой для простоты предполагается ю2 = 2ю: = 2ю. Доказывается, что наличие упругого ограничителя приводит к асимптотически устойчивым субгармоническим колебаниям, т.е. колебаниям, составленным из суммы колебаний с частотами ю и 2ю.
2. Общее уравнение для амплитуды асимптотически устойчивых периодических колебаний в слабонелинейных механических системах, содержащих два тела. Наиболее общую систему обыкновенных дифференциальных уравнений, описывающих координаты х1 и х2 двух тел, связанных посредством слабо нелинейных пружин, при учете сухого трения и периодического воздействия, можно записать в виде
т1 X + Mx +
т2 X2
6 ( 0 (б) X ) 0 (б) X 6 #2 ( 0г(б) X) 02(6) -X
= 6Дг, X, X, 6); X = (X!, -2)
(2.1)
где m1 и m2 — массы тел, е > 0 — малый параметр, M — (2 х 2)-матрица, ^(е) и 02(е) — (1 х 2)-матрицы, F : К х К2 х К2 х [0, 1] ^ К2, точкой обозначена производная по времени t. На использованные функции позже будут наложены некоторые условия. Здесь пока отметим, что скалярные функции q1 и q2 непрерывны и кусочно-линейны, так
что соответствующие производные и #2 — кусочно-постоянны. Перепишем систему (2.1) следующим образом:
т1 x1 Ш2 X2
+ Mx + 6
#1 #2
= 6Дг, X, X, 6); д, (г) = д,(О,(6)X(г)), у = 1, 2
Видно, что, вводя новые переменные [3] у,(г) = т-х,(г) + 6д,(Qj(6)x(г)), у = 1,2
ее можно переписать в виде четырех уравнений первого порядка с непрерывными правыми частями
эс,- = Ы^ у,) = (у,- 6д,(О(6)x))М, ] = 1 2
У1 у2
(
+ Mx = 61
г, X,
X, У1) У2)
(2.2)
Соответствующая порождающая система выписывается так:
Xj = yj/j = 1, 2
Уj = - ajixi — üj2%2, j = 1, 2
(2.3)
(2.4)
где ау — компоненты матрицы М.
Для применения принципа усреднения требуется предположить, что все решения системы (2.3), (2.4) — периодические. Выясним условия, при которых это имеет место. Подставляя уравнение (2.3) с у = 1 в уравнение (2.4) с у = 1, уравнение (2.3) с у = 2 в уравнение (2.4) с у = 2, а полученное в первом случае уравнение в полученное во втором случае, приходим к следующему уравнению для х{.
Xi + ax + a2 Xi — a 12X1 + ai a2Xi — 0
a, —
a2 —
22
m2
ai2 =
a i2 a 2 i mi m2
Из уравнения (2.4) при j = 1 получим X2 = (— au Xi — mi x?Ci)/an
(2.5)
(2.6)
Для того чтобы система (2.3), (2.4) имела только периодические решения, необходимо, чтобы собственные значения характеристического многочлена уравнения (2.5) были различными и чисто мнимыми. Корни этого многочлена находятся по формуле
2 = — 2 (ai + a2) ± ^ V(ai — a2)2 + 4a
i2
(2.7)
Значит, решения (2.3), (2.4) — суммы периодических функций, если
ai2 < aia2 (2.8)
Общее решение уравнения (2.5) записывается в виде
X,(?) = a12(A1csinю,? + Aiscosю,t + A2csinю2? + A2scosю2t), ю,,2 = fj—^i,2
где A1c, A1s, A2c, A2s — произвольные постоянные. Учитывая выражение (2.6), запишем общее решение системы (2.3), (2.4) в виде
col(Xi (?), X2( ?), yi( t), У2( t)) = Q( t) col(Aic, Ais, A2c, A2s )
где
Q( t) =
a12sin ю, t a12cos ю,? a12sin ю2? a12cos ю2 t
b,sin ю, t b,cos ю, t b2sin ю2? b2cos ю2?
c,cos ю,? —c,sin ю, t c2cos ю2 t —c2sin ю2 t
d,cos ю,? —d,sin ю, t d2cos ю2 t —d2sin ю2?
(2.9)
bj = — a,, + m, ю2, cj = m, ю.а12, dj = m2ю/■(— an + m, ю2 )
Лемма 1. Пусть &,(() — фундаментальная система решений линейной системы и = Си, где C — (п х п)-матрица. Непрерывно дифференцируемая функция t ^ и(0 — решение системы
и = Си + g(г, и), ^ е С(К х К", К")
на отрезке [0, t0] тогда и только тогда, когда функция
и (г) = г)-1и( г)
является на этом отрезке решением системы
и = г )-1 g (г, г) и)
(2.10)
(2.11)
(2.12)
Таким образом, для приведения системы (2.2) к стандартной форме принципа усреднения необходимо вычислить матрицу, обратную матрице (2.9). Прямой подстановкой проверяется, что обратная матрица дается формулой
Q( t)-1 =
Ф О О ¥
1
m\m2a 12(ю? - ю^)
Х2 О О Х1
©2 Л2 01 Л1
Ф =
"^с 11 -^s21 ^í11 -^с21
¥ =
^с22 ^í12 -^s22 %с12
©;- = m1 т2юi
p2isinю^ -a12sinю^ p2¡cos-a12cos
Л,- =
cos Юjt - sin sin ю^ cos ю/
m2p2icosю^ -т 1a12cos -m2^2isinю^ m1 a12sin
„ cos юЛ Y sin юЛ 2 2 .... ,
^cij = -J-, Lij = -J-, P21 = -allmlЮ , P22 = - a 11 + m^2, i, J = 1, 2
ю, ю,
О — нулевая (2 х 2)-матрица.
Используя лемму 1, можем записать систему (2.2) в стандартной форме принципа усреднения
A = sQ(t) g(t, A, s); A = (A^, Au, A2„ ) g(t, A, s) =
-col(P1 (t), P2(t)) F(t, A(t), col(Г1 (t), Г2(t), s))
(2.13)
(2.14)
r(t) = 1 Qi + 2(t)A - sPi(t), Pi(t) = 1 q(Qi(s)A(t)), A(t) =
mi mi
Q1( t) A Q2 (t) A
0,(0 — г'-я строка матрицы Q(t) (, = 1, 2). Так как матрица равномерно ограничена на К, то асимптотически устойчивому решению t ^ системы (2.13) соответствует асимптотически устойчивое решение
со^ (г), X2( г), У1( г), У2( г)) * = г)А (г)
системы (2.2). Более того, компоненты (y1, y2) этого решения, очевидно, дифференцируемы по времени, и значит, компонента (х1, x2) — асимптотически устойчивое решение исходной системы (2.1) в этом случае.
Итак, установлено, что если выполнено условие (2.8), то асимптотически устойчивым решениям A(t) системы (2.13) соответствуют асимптотически устойчивые решения
(Xi (?), x.( ?)) = (Oi( t) A (t),Q2 (t) A (?))
системы (2.1), причем матрица Q(t) дается формулой (2.9).
3. Вторая теорема Боголюбова для систем с интегрально дифференцируемыми правыми частями. В этом разделе доказывается, что правая часть полученной в разд. 2 системы (2.13) удовлетворяет требованиям негладкого аналога второй теоремы Боголюбова [2]. Определение 1. Функцию
f е C([0, T] х IR" х [0, 1 ], IR")
назовем интегрально дифференцируемой, если каждому у > 0 соответствует 8 > 0 и множество Mс [0, T], лебегова мера которого не превосходит у > 0, такие, что для всех значений
II и — и0|| <5, t е[0, T]\M, 6 е [0,5] (3.1)
функцияf(t, ■, е) дифференцируема в точке и и
IfU(?, и,б) — fU(t, U0, 0)||<у
Лемма 2. Пусть
h е C°, C = C°(R х R" х[0, 1 ], R")
R" = (£, е R": sign fe) = s, i е 1, 2,..., "} s е (—1, 1}" = (—1, 1} х ... х {—1, 1}
Предположим, что существует 2n функций
hs е C1 (R х R" х [0, 1 ], R"), s е{—1, 1}" таких, что
h(?Д,6) = hs(?Л6), (?Д,б)е R х R" х [0, 1 ], s е (—1, 1}"
Пусть задана функция D е C:(R х R" х [0, 1], R") и E(t, и, е) = D1(t, и, е) ■ ... ■ Dn(t, и, е) -произведение ее компонент. Предположим, что E(-, и0, 0) имеет конечное число нулей на [0, T]. Тогда функция
(?, и, 6) ^ h(t, D(?, и, 6), 6) (3.2)
удовлетворяет требованию интегральной дифференцируемости.
Доказательство. Пусть 0 < tl < t2 < ... < tk < T — все нули функции E(-, и0, 0) на отрезке [0, T]. Зафиксируем у > 0 и положим
M = ( j (tt — у/(2k), t¡ + y/(2k))j n [0, T]
т.е.
Е(и0, 0) Ф 0 для всех / е [0, Т]\М (3.3)
Покажем, что существует 8 > 0, такое, что Е(t, и, е) Ф 0 для всех значений (3.1). Действительно, предположив противное, получаем последовательность
('т' ит' ет) ^ ('0' и0' 0) пРи т ^ ^ *0 е [0' Т]\М
такую, что Е(т, и , е„) = 0 при т е в противоречие с условием (3.2). Таким образом, при каж-
дом значении (3.1) найдется st и е е {—1, 1}", такое, что и, е) е К^ , и значит, функция (3.2)
■Ч1
дифференцируема в точке и. Заметим, что величина 8 > 0 может быть уменьшена еще и настолько, что st и е = и Е при всех значениях (3.1).
Аналогично, доказывая от противного и выделяя соответствующую сходящуюся подпоследовательность, приходим к заключению, что
Б(/0' % 0) е Я"ш ; 11ш Ф 5 , ^ , 0, '0 е [0' Т]\М
т т V т т т т т
Но, по определению, В^^ п = 0 при ^ Ф я2. Полученное противоречие завер
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.