ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА
Том 77. Вып. 4, 2013
УДК 531.36:534.1
© 2013 г. Б. Я. Локшин, В. А. Самсонов
АВТОРОТАЦИОННЫЕ И АВТОКОЛЕБАТЕЛЬНЫЕ РЕЖИМЫ ДВИЖЕНИЯ АЭРОДИНАМИЧЕСКОГО МАЯТНИКА
На примере аэродинамического маятника рассматривается поведение механической колебательной системы со знакопеременной диссипацией. Проведено исследование фазовых портретов, изучены их перестройки и определены критические значения параметра. Определены положения равновесия маятника, автоколебательные и авторотационные режимы движения, исследована их устойчивость.
Для механических колебательных систем обычно имеется возможность достаточно точно задать математическое описание статического силового воздействия, например, из статических экспериментов. Совершенно иначе обстоит дело с описанием динамического воздействия, зависящего от скорости движения. Определение диссипативно-го или антидиссипативного характера силового воздействия на движущийся объект, как экспериментальное, так и теоретическое, вызывает большие трудности. Тем не менее, изучение поведения "в большом" систем с переменной диссипацией необходимо, поскольку имеет важное прикладное значение (см., например, [1—3]).
Математическая модель силового воздействия, зависящего от скорости, обычно носит эвристический характер и содержит параметры. При изучении поведения системы в зависимости от значений параметров особое значение имеет исследование вопросов существования или отсутствия замкнутых фазовых траекторий, как устойчивых (аттракторов), так и неустойчивых (репеллеров), поскольку именно замкнутым траекториям отвечают наиболее интересные в прикладном отношении автоколебательные или авторотационные движения исходной системы.
Объект исследования. Рассматривается поведение конкретной колебательной системы с одной степенью свободы — аэродинамического маятника [4]. Такой маятник представляет собой тонкую плоскую пластинку, жестко закрепленную вдоль державки, другой конец державки закреплен на неподвижном цилиндрическом шарнире (ось качания маятника). Вся эта конструкция находится в стационарном воздушном потоке, скорость которого равна V. Считается, что характерный размер пластинки в поперечном сечении (ширина пластинки) в направлении "вдоль державки" много больше ее размера в направлении "поперек державки".
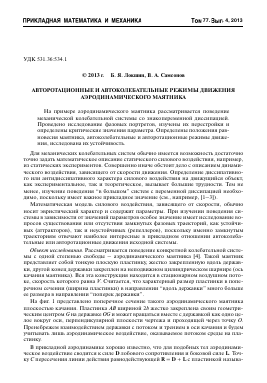
На фиг. 1 представлено поперечное сечение такого аэродинамического маятника плоскостью качания. Пластинка АВ шириной 2Ь жестко закреплена своим геометрическим центром G на державке OG и может вращаться вместе с державкой как одно целое вокруг оси, перпендикулярной плоскости чертежа и проходящей через точку О. Пренебрежем взаимодействием державки с потоком и трением в оси качания и будем учитывать лишь аэродинамическое воздействие, оказываемое потоком среды на пластинку.
В прикладной аэродинамике хорошо известно, что для подобных тел аэродинамическое воздействие сводится к силе D лобового сопротивления и боковой силе L. Точку С пересечения линии действия равнодействующей R = D + L с пластинкой называ-
-V
Фиг. 1
ют центром давления. Величины D и L сил аэродинамического воздействия примем, как обычно, в следующей форме:
Б = Сй (а)р /2, Ь = С1 (а)р /2
где Сл (а) и С1 (а) — аэродинамические коэффициенты, — площадь пластинки.
Будем считать, что в каждый момент времени сила Я. воздействия среды полностью определяется вектором Ус скорости центра давления относительно среды, т.е. мгновенными значениями величины Vc этой скорости и угла а (эффективного угла атаки) между вектором Ус и державкой. Вектор и абсолютной скорости движения центра давления равен и = V + УС, причем |и| = и = (г - в(а))9, где г — длина державки, 0 — угол поворота державки, Е(а) — сдвиг центра давления C, отсчитываемый от геометрического центра G, при этом функция в(а) считается положительной, если центр давления сдвигается в сторону к оси вращения и отрицательной в противоположном случае.
Уравнения движения маятника. Поведение рассматриваемого маятника можно описать уравнениями [4, 5]
9 = га, га = -д(а)(1 - е(а))и (1)
u sin а = sin 9 + (l - е(а))ю, u cos а = cos 9
Здесь введены следующие безразмерные параметры и переменные:
3
, r b р5 е(а) , ч „ , ч Vt Vc bÓ
I = -, а = , е(а) =, q(a) = aC„(á), т = —, u = -£, ю = b2 (3)
b 2J b b V V
где J — момент инерции всей конструкции относительно точки О, точкой обозначена производная по времени т, Cn (а) = C¡ (а) c os а + Cd (а) sin а — коэффициент нормальной силы.
Зависимости q(a) и е(а), в соответствии с квазистатической моделью обтекания, определяются из статических экспериментов в аэродинамических трубах и считаются известными. Например, были приведены [6] графики таких зависимостей для плоских прямоугольных пластинок различного удлинения А.
Таким образом, модель (1), (2) движения маятника содержит две функции от угла атаки, q(a) и е(а), определяемые только формой маятника, и два конструктивных параметра: безразмерную длину державки l, и безразмерную величину a, обратно пропорциональную моменту инерции конструкции.
Отметим, что модель аэродинамического момента [4, 5], введенная в правую часть уравнений (1), содержит неявным образом зависимость от угловой скорости Ю. Обычно в прикладной аэродинамике подобная зависимость вводится через так называемые вращательные производные и носит линейный характер. Используемая модель, можно надеяться, будет иметь более широкую область применения.
Будем считать, что функции q(a) и е(а) определены, непрерывны, трижды дифференцируемы на отрезке [-п, п] и обладают следующими свойствами (штрихом здесь обозначена производная по углу а):
а) функция q(a) — нечетная относительно а = 0, четная относительно а = п/2 и
q(a) > 0 при а е (0, п), q(0) = 0, q'(0) > 0, q'(л/2) = 0, q"(л/2) < 0
б) функция е(а) — четная относительно а = 0, нечетная относительно а = п/2 и
е(а) > 0, е'(а) < 0 при а е (0, п/2), е(п/2) = 0, е(0) = maxе(а) = em, е'(0) = 0, е "(0) < 0
Отметим еще одну особенность уравнений (1), (2). При сделанных предположениях относительно симметрии обтекания маятника система, наряду с решением (-Э, к>, a, u), имеет также решение (-0, - ю, - a, u). Поэтому в дальнейшем достаточно рассматривать лишь полуполосу Q = {(9, ю): 9е [-п, п], ю > 0} как развертку части фазового цилиндра.
Свойства кинематических уравнений. Разрешая кинематические уравнения (2) относительно а и u и подставляя полученные зависимости а = а(-Э, ю) и u = u(9, ю) в уравнения (1), можно было бы приступить к исследованию поведения маятника при разных значениях параметров и начальных данных. Однако при е ф 0 уравнения (2) могут иметь неединственное решение.
Рассмотрим более подробно этот вопрос. Покажем, что на интервале
h = {(9,ю): 9 = -п/2,ш€ (1/(1 + е,), 1/(/-е,))} (4)
существуют ровно три решения этих уравнений.
Действительно, из второго уравнения (2) при 9 = -п/2 следует: 1) cos а = 0, либо 2) u = 0. В первом случае решение имеет вид
а1 = sign(/ ю - 1)п/2, u1 = |/ ю -1 (5)
и существует при всех значениях ю. Во втором случае (u = 0) из первого уравнения (2) имеем уравнение е(а) = / - 1/ю относительно а. Для ю е (1/(/ + ет), 1/(/ - ет)) оно имеет два симметричных решения ±а (ю), где а (ю) — единственное положительное решение полученного уравнения. Отметим, что
а е (0, п/2) при юе (1//,1/(/ - ет)), а е (п/2,п) при юе (1/(/ + ет),1//)
Эти решения можно представить в виде
а2 = а, и2 = 0, а3 = -а, и3 = 0 (6)
Итак, на фазовой плоскости переменных (О, ю) существует интервал (4), такой, что в каждой его точке существуют ровно три решения (5), (6) кинематических уравнений (2). Вне этого интервала на прямой 9 = -я/2 уравнения (2) имеют только одно решение (5).
Рассмотрим теперь поведение найденных решений при малых отклонениях А9 и Лю от интервала (4). Выберем для определенности ю е (1 //,1 /(/ - ет)). Тогда решения (5) и (6) имеют вид
а 1(-п/2, ю) = я/2, и1 = / ю-1; а2(-п/2, ю) = а (ю), и2 = 0;
а3(-п/2, ю) = -а (ю), и3 = 0 Отклонениям А9 и Лю отвечают приращения Аа^ и Аик (к = 1, 2, 3).
В окрестности первого решения из уравнений (2) имеем
Ли = / Лю - е '(п/2)юЛа, - (/ю- 1)Ла = Л-Э
Видно, что решение Ла, Ли этих уравнений существует независимо от знака приращений Л-9 и Лю. Следовательно, первое решение а1, и1 определено на фазовой плоскости слева и справа по 9 от рассматриваемого интервала (4).
В окрестности второго (и третьего) решения имеем
вша Л и = ш-1Лш - е'(а)гаЛа, сова Л и = Л-Э
Так как а е (0, я/2), а приращение Ли для данного решения может быть только положительным, то решение Ла, Ли этих уравнений существует только для положительных значений Л-9. Таким образом, второе и третье решения а2, и2, а3, и3 определены только в некоторой области Ы: с Q, примыкающей к интервалу (4) справа; влево от него эти решения не продолжаются (своего рода обрыв поверхности а = а(-Э, ю)).
Аналогичная ситуация имеет место и для промежутка
9 = -я/2, ю е (1/(/ + ет), 1//))
Первое решение существует слева и справа от интервала (4), а второе и третье — только в некоторой области Ы2 с Q, примыкающей к этому интервалу слева.
Таким образом, к интервалу (4) примыкают две области, и Ы2, трехзначности функции а(-Э, ю) (для удобства будем считать, что а(-п/2,1/1) = ±п/2). Эти области являются проекциями на плоскость (О, ю) двух складок поверхности а(-Э, ю) с одной общей точкой 9 = -я/2, ю = 1//.
Граница области Ы: состоит из трех кусков: части интервала (4) (отрезка 9 = —я/2, ю е (1 //, 1 /(/ - ет))), на котором а имеет три значения: а1, а2, а3, и двух огибающих, уравнения которых задаются в следующей неявной форме:
8т(9-а) + ю(/ - е(а))со8 а = 0 (7)
со8(9 - а) + ю(/ - е(а)^т а + юе'(а)со8а = 0
где |9| < я/2, а параметр а е (0, я/2). На одной огибающей совпадают решения а1 и а2, на другой — а: и а3. В точке 9*, ю* пересечения огибающих (точке возврата) совпадают все три решения: а1 = а 2 = а 3 = а*. Значение а* единственным образом определяется из уравнения
2е '(а^т а- е "(а)со8 а = 0 (8)
Подставляя значение а* в уравнения (7), находим и О*, ю *.
Аналогичным образом задается и граница области H2, но в уравнениях (7) следует принять
-п < 0
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.