ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА
Том 77. Вып. 1, 2013
УДК 539.32
© 2013 г. А. В. Бойко, В. М. Кулик
ОБ ОДНОМ МЕТОДЕ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ВЯЗКОУПРУГИХ СВОЙСТВ ЦИЛИНДРИЧЕСКОГО ОБРАЗЦА
В рамках двумерной модели деформирования рассматривается задача о вынужденных колебаниях цилиндра, закрепленного на вибрирующем основании и нагруженного сверху некоторой массой. Граничные условия задаются на всей поверхности цилиндра, и используется уравнение баланса сил на его внешней грани. Предлагается алгоритм решения с использованием метода коллокаций. Показано, что точность определения модуля упругости и коэффициента потерь значительно выше, чем при использовании методов, основанных на одномерной модели, поскольку предлагаемая методика не требует знания динамического форм-фактора.
Измерение динамических свойств вязкоупругих материалов основывается на решении задачи о вынужденных колебаниях цилиндрического образца, закрепленного на вибрирующем основании и нагруженного сверху некоторой массой. Использовались приближенные одномерные модели деформирования образца [1, 2]. Предложено уравнение баланса сил на верхней грани образца [3], что значительно расширило описанные ранее [4] возможности метода. Показано [4], что новый метод обладает большей точностью и расширенным диапазоном измерения вяз-коупругих свойств материалов, а конструкция установки отличается простотой и надежностью, поскольку не требуется настройка или юстировка, а также знание колебательных свойств источника вибраций. Возможности этого метода ограничены использованием одномерных моделей деформирования, что требует введения коэффициента формы для учета размеров образца. Коэффициент формы известен далеко не всегда, поскольку он определяется эмпирически для ограниченного диапазона параметров. Дальнейшее развитие метода связывается с использованием двумерной модели деформации образца при расчете модуля упругости и коэффициента потерь. Такой расчет производился довольно сложным образом [5] — минимизировалась разница между измеренными данными и обратным расчетом этих параметров из прогнозируемых свойств материала с использованием метода конечных элементов.
Предлагаемый метод измерения динамических вязкоупругих свойств материалов, основанный на анализе вынужденных колебаний нагруженного образца с помощью двумерной модели, позволяет избавиться от необходимости знания коэффициента формы, применявшегося ранее в одномерных моделях деформирования для учета размеров образца, и существенно повысить надежность получаемых результатов.
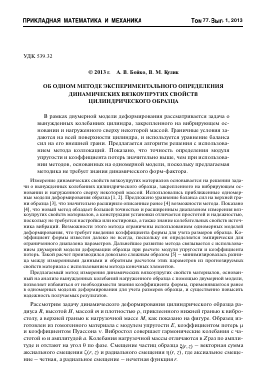
Рассмотрим задачу динамического деформирования цилиндрического образца радиуса Я, высотой Н, массой т и плотностью р, приклеенного нижней гранью к вибростолу, а верхней гранью к нагрузочной массе М, как показано на фигуре. Образец изготовлен из гомогенного материала с модулем упругости Е, коэффициентом потерь ц и коэффициентом Пуассона V. Вибростол совершает гармонические колебания с частотой ш и амплитудой а. Колебания нагрузочной массы отличаются в 2раз по амплитуде и отстают на угол 0 по фазе. Смещение частиц образца Цг, I) — векторная сумма аксиального смещения £(г, г) и радиального смещения ц(г, г), где аксиальное смещение — четная, а радиальное смещение — нечетная функция г.
Датчики
Напряжения внутри образца описываются следующими формулами:
стгг = Е (1 + щ)
ст = Е (1 + ;>)
дП + П + д0 + 1 дц
(1 -2v)(1 + v)vдг г дг) 1 + vдr
V Гдп+Л+дС| + 1 дС
(1 - 2v) (1 + V) чдг г дг) 1 + vдz ст = Е (1 + ;>)у (дц + дС
2 (1 + V) 1дг дг Уравнение движения имеет вид [6]
д2| = + (С2 - C2)graddiv¡;
д,2
С 2 = Е(1 +;» с2 = Е(1 + '»(1 -V) = т ' 2р(1 + v)' ' р(1 + V)(1 - 2^' Р ПЯ 2Н
Для случая гармонических колебаний оно может быть переписано в виде
( ^2
(1)
С,
52 -Л -Л 2 \
п дп 2 д с г -2 + г—— п + г ——
дг2 дг дгдг
, ^2 2 + С, г
(-<2 п2 д п д с
дг2 дгдг
,22 „ + г ю п = 0
2
с2
2
52 -л -Л 2
п дп д с г-+ —! + г-2
дг дг дг дг
+ С2
^ -л2 -л -л2 -л \
д п дп д с дс —г---! + г —2 +
дгдг дг дг2 дг
+ г ю с = 0
140
А.В. Бойко, В.М. Кулик
Граничные условия:
отсутствие радиальных смещений на приклеенных поверхностях г = 0 и г = Н: п = 0 (3)
заданные аксиальные смещения на верхней и нижней гранях образца г = 0: Z = аеш, г = H: Z = Zaei(at-е) (4)
отсутствие напряжений на боковых гранях образца
г = R: arz = 0 ^ + = о (5)
dz dr
Grr= 0 ^ (1 -v)dn + vin+dS^ = о (6)
dr \r dzJ
Замыкание системы уравнений для определения значений E и ц по измеренным данным производится с помощью уравнения баланса сил на верхней грани образца — внутренние напряжения уравновешены давлением, развиваемым от ускорения массы М:
R
MZro2ei(>t-0) = 2лС;2 ^ (H, r) rdr (7)
о dz
Для аппроксимации исходных уравнений сделаем в них замену переменных x = r/R, у = 2г/Н — 1, приводящую расчетную область к квадрату [—1, +1] х [—1, +1]. Используя стандартные формулы дифференцирования, перейдем в системе (2) к переменным x и у. После этого аппроксимируем полученные уравнения методом коллокаций, используя сетку {х,, yj: i = 0,1,..., 2Nx - 1, j = 0,1,..., Ny - 1}, где x, уj — точки ±1 и корни многочлена Чебышева второго рода т.е. k = cos(nk/N), k = 0, 1, ..., N (для направлений x и у
соответственно N = 2Nx — 1 и N = Ny — 1 [7]).
При использовании метода непрерывные операторы дифференцирования заменяются на их матричные дискретные аналоги. Например, элементы такой матрицы для производной первого порядка следующие [8]:
(dn )оо =-;—, (dn ) nn = —(dn )оо
—X ■ c (—1)i+j
(Dn)jj =-, (Dn)j = ^, i * j, i, j = 1,2,...,N — 1
2(1 — x 2)
где = 2 при г = 0 или г = И, = 1 в остальных случаях. Дискретный аналог производной второго порядка получается произведением матриц первого порядка.
Представим функции смещений г|(ь 1}) и Цу, ) в узловых точках матрицами (п),-,^ и (¡С),}. Так как сделанная замена переменных линейная, матрицы первых дискретных аналогов производных по г и z имеют вид Вг = Вш/Я и В^ = 2В^/И соответственно. Из-за осевой симметрии рассматриваемой задачи достаточно рассмотреть интервал
г е [0, Я]. При этом матрицу Вг можно свести к матрице В+ для четной функции ^(у,I]) и В- для нечетной функции п(г, ), элементы которых определяются соотношениями
(В±)- = (Вг)- ± (Вгк, ;,} = 0,1, ..., N + 1)/2, к = N + 1 - }
Если расположить элементы матриц п и С в виде вектора-столбца составленного последовательно из столбцов п и С (т.е. в так называемом лексикографическом порядке), матрицы дискретных аналогов производных по направлениям г и г можно получить, используя тензорное (кронекерово произведение) [7]:
Бг = Б+ ® 1г, Бг = Б- ® 1г, Бг = 1Г ® Бг
Бгг = Б+2 ® 1г, Б„. = Б-2 ® 1г, Бгг = I. ® Б)
Бг, = Б+ ® Бг, Бгг = Б- ® Бг
где ^ и 1г — единичные матрицы размеров Иу и Их соответственно. Тогда исходная система уравнений аппроксимируется следующим матричным уравнением:
(Cj(r2Drr + уБг - Ir ® Iz) + r2(C2DZZ + ю2) r2 Drz(C2 - C2)
(C2 - C2)(rDrz + Dz) Cj (Drr + Dr) + r(C2tDzz + ю),
Zl=0
Граничные условия накладывали путем замены соответствующих рядов в левой и правой частях уравнений на дискретные аналоги уравнений (3)—(6) [8]. Полученные линейные задачи решали стандартным решателем MATLAB. Окончательные аппроксимации Е и ц находили итерациями Ньютона полученных решений, чтобы удовлетворить условию совместности, ур. (7).
Тесты показали, что когда число узлов по каждому из направлений меняется от 12 до 20, полученные значения E и ц изменяются менее чем на 1% в исследуемой области параметров, что находится также в пределах экспериментальной ошибки при измерении амплитуд и фаз. Поэтому дальнейшее увеличение количества узлов не в состоянии обеспечить более точный результат и нецелесообразно. Представленные результаты получены при Nx = Ny = 14.
Таким образом, для нахождения зависимостей Е(ю) и п(ю) необходимо знать параметры M, m, H, R, v, Zи 9, из которых последние два требуют специального измерения на каждой заданной частоте ю.
Схема экспериментальной установки, собранной из стандартных приборов, представлена на фигуре. Образец материала приклеен к столу вибростенда ВЭДС-100Б с развиваемым усилием до 100 Н, а сверху к образцу также приклеена инертная масса. Вибратор создает гармонические колебания в вертикальном направлении в диапазоне частот от 60 Гц до 10 кГц. Акселерометры (пьезо-керамические датчики виброускорения) измеряют ускорения Re(—ю2ае1ш') и Re(— Zaa>2e1<mt - е)) на нижней и верхней гранях образца соответственно. Данные с них с помощью аналого-цифрового преобразователя передаются в компьютер для выделения Z, 9 и нахождения Е и п через решение описанной выше задачи. Отличительная особенность предлагаемого метода состоит в том, что колебательные свойства вибратора не влияют на результаты измерений, поэтому установка не требует юстировки, настройки и проста в эксплуатации.
При помощи описанного метода проведено определение вязкоупругих свойств кремнийорганической резины Silastic S2 в диапазоне частот 20—2200 Гц. Получена хорошая повторяемость полученных значений при измерении модуля упругости от частоты; случайные отклонения не превышали 1%. Вместе с тем, в зависимости от величины использованной нагрузочной массы, имеет место расслоение полученных зависимостей. Предполагаемая основная причина этого эффекта — отсутствие учета в методе как уменьшения высоты образца под действием статической нагрузки, так и выгиба наружу боковой поверхности образца. Динамическая деформация боковой поверхности зависит от частоты и амплитуды приложенного воздействия и имеет сложную форму. Учет этих изменений формы боковой поверхности в уравнениях (2), особенно в окрестности углов, представляет собой довольно сложную задачу.
Для реального использования двумерного метода описания деформации предлагается проводить измерения на нескольких (от трех до пяти) нагрузочных массах, а за-
142
A.B. Бойко, B.M. Кулик
тем экстраполировать результаты на M = О. Расслоение кривых также существенно уменьшается при проведении измерений на малых амплитудах деформаций образца, что при условии малости экспериментальных погрешностей способствует увеличению точности результата. Поскольк
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.